




现在越来越多的企业开始做国外的项目,电气设计项目往往需要与国外进行协作与交流,所以电气项目需要常常需要翻译才能发给国外。
SOLIDWORKS Electrical作为一款专为电气和自动化系统设计的企业用户打造的软件,不仅具备强大的2D电气设计与3D布线功能,还提供了便捷的多语言文本管理翻译工具,极大地提高了项目翻译的效率和准确性。
下面我们具体看一下,我们SOLIDWORKS Electrical 如何进行项目翻译的。
我们可以将项目和设备分别做设置,方便我们后期的快速翻译项目。
项目模板操作
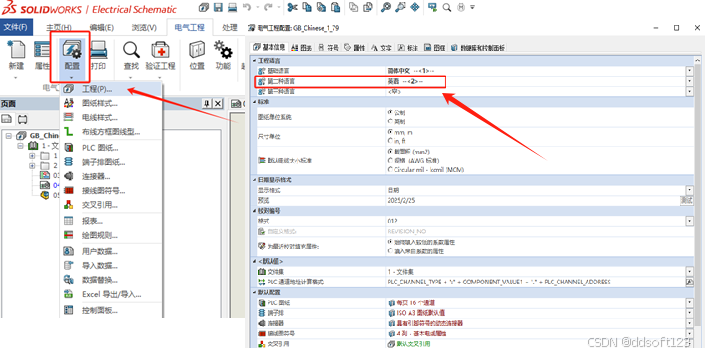
一、首先我们可以先设置项目的第二语言是英语(根据自己需求设置)。
二、在处理里面找到翻译。同时
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















 到【灌水乐园】发言
到【灌水乐园】发言







