




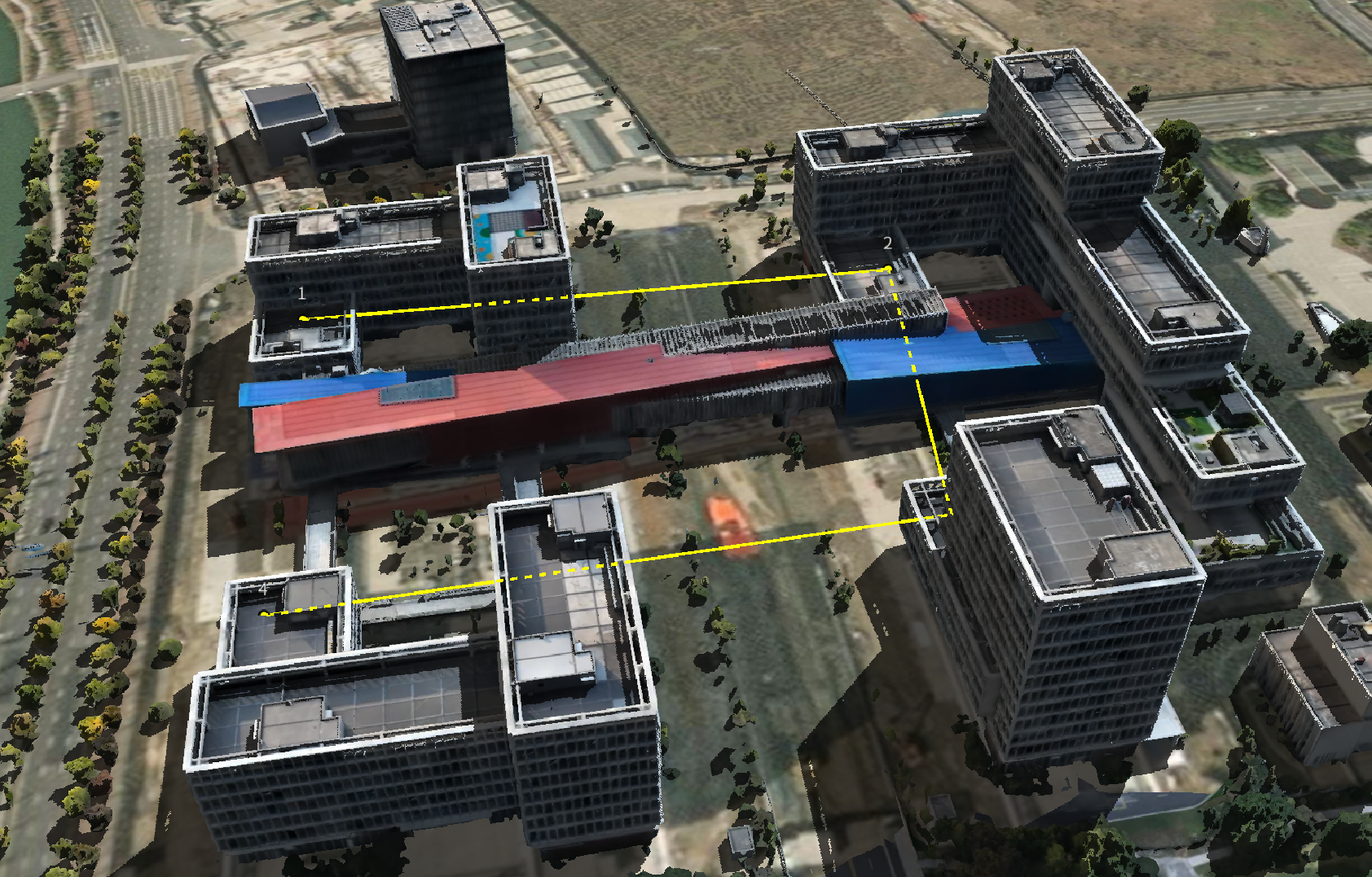
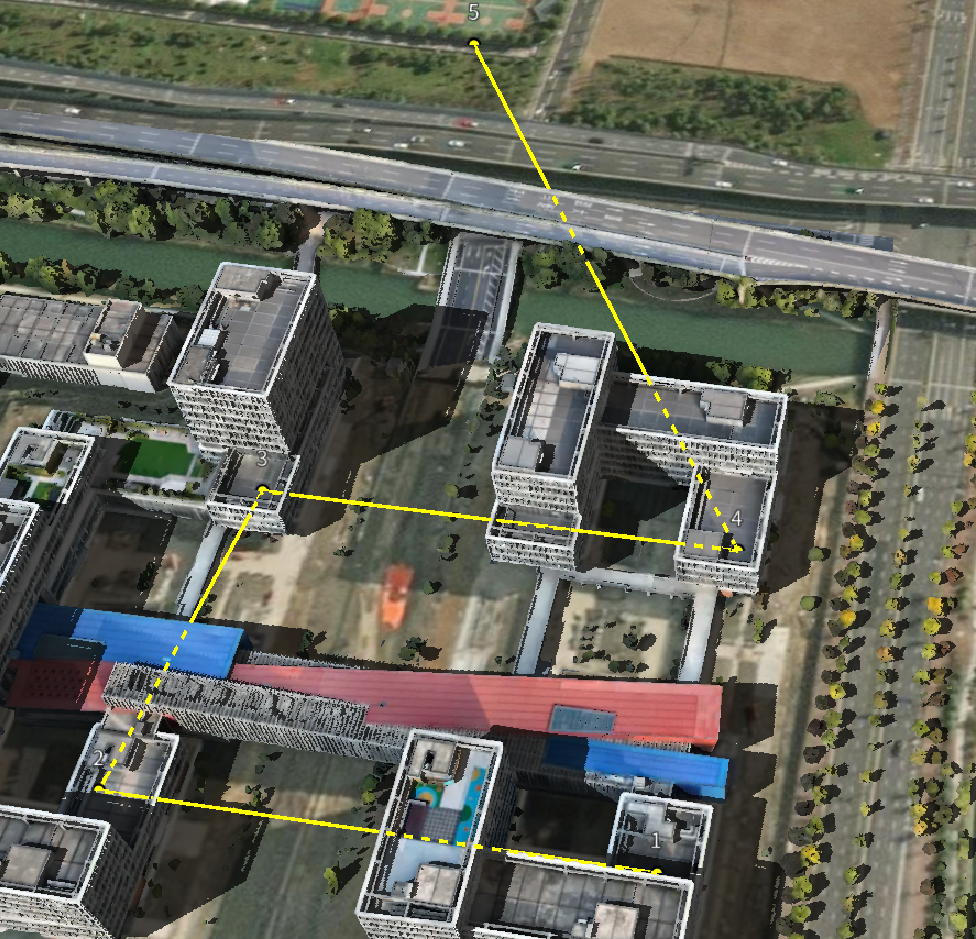
效果

实现
import cesiumUtils from '@/utils/cesium/cesiumUtils.js'
export default {
name: 'depthDetection',
components: {},
data() {
return {
points: [],
}
},
mounted() {
this.initViewer()
},
beforeDestroy() {
cesiumUtils.destroy();
},
methods: {
initViewer() {
this.viewer = cesiumUtils.initViewer("init-viewer-wrapper", {terrain: true});
const tileset = cesiumUtils.load3DModelAdvanced('/model/terra_b3dms1/tileset.json');
if (tileset) {
cesiumUtils.zoomTo3DModel(tileset);
}
this.handleclick()
},
handleclick(){
let that = this;
const handler = new Cesium.ScreenSpaceEventHandler(this.viewer.scene.canvas);
handler.setInputAction(function (movement) {
that.addPoint(movement.position);
}, Cesium.ScreenSpaceEventType.LEFT_CLICK);
},
addPoint(screenPosition){
let cartesian = null;
const pickedObject = this.viewer.scene.pick(screenPosition);
if (Cesium.defined(pickedObject)) {
cartesian = this.viewer.scene.pickPosition(screenPosition);
} else {
const ray = this.viewer.camera.getPickRay(screenPosition);
cartesian = this.viewer.scene.globe.pick(ray, this.viewer.scene);
}
if (!Cesium.defined(cartesian)) {
console.warn('无法拾取位置');
return;
}
const cartographic = Cesium.Cartographic.fromCartesian(cartesian);
const point = {
cartesian: cartesian,
cartographic: cartographic,
lng: Cesium.Math.toDegrees(cartographic.longitude),
lat: Cesium.Math.toDegrees(cartographic.latitude),
height: cartographic.height
};
this.points.push(point);
this.drawPoint(cartesian, this.points.length)
if(this.points.length > 1){
this.drawLine()
}
},
drawPoint(position, index = 0) {
this.point = this.viewer.entities.add({
position: position,
point: {
pixelSize: 8,
color: Cesium.Color.YELLOW,
outlineColor: Cesium.Color.BLACK,
outlineWidth: 2,
},
label: {
text: index.toString(),
font: '14pt sans-serif',
fillColor: Cesium.Color.WHITE,
outlineColor: Cesium.Color.BLACK,
outlineWidth: 2,
style: Cesium.LabelStyle.FILL_AND_OUTLINE,
pixelOffset: new Cesium.Cartesian2(0, -30),
}
});
},
drawLine() {
// 清除旧的线段
if (this.line) {
this.viewer.entities.remove(this.line);
}
const positions = this.points.map(p => p.cartesian);
this.line = this.viewer.entities.add({
polyline: {
positions: positions,
width: 3,
material: Cesium.Color.YELLOW,
clampToGround: false,
depthFailMaterial: new Cesium.PolylineDashMaterialProperty({ //(被建筑遮挡部分具有穿透效果、虚线)
color: Cesium.Color.YELLOW,
}),
}
});
},
}
}
</script>

















 1770
1770


 到【灌水乐园】发言
到【灌水乐园】发言








