



2020 IEEE 第9届全球消费电子大会 (GCCE)
基于区块链的NTMobile与Zabbix的服务器集成管理系统提议
摘要
基于区块链的NTMobile(Network Traversal with Mobility)在IPv4/IPv6网络中提供了IP移动性和端到端连接,但在大规模环境中引发了服务器管理员监控负担增加的问题。本文提出了一种基于Zabbix的针对基于区块链的NTMobile的服务器集成管理系统。我们实现了NTMobile服务器守护进程和Zabbix的扩展,以实现对NTMobile服务器维护的各种信息的集中管理。通过运行验证,确认了该系统能够降低服务器管理员的监控负载。
I. 引言
已提出一种基于区块链的移动性网络穿越(NTMobile)架构,该架构在IPv4/IPv6网络中实现IP移动性和端到端连接[1],[2]。然而,当NTMobile在大规模环境中运行时,需要监控的服务器数量增加,服务器管理员的负担可能加重。本文提出了一种基于Zabbix的针对基于区块链的NTMobile的服务器集成管理系统。
II. 基于区块链的NTMobile
NTMobile由NTM移动实体、注册服务器(RS)和中继服务器(RS)组成。其中,NTM移动实体实现NTMobile,注册服务器(RS)负责管理NTM移动实体注册信息,中继服务器(RS)用于在NTM移动实体跨网络(包括IPv4与IPv6网络)连接通信时转发通信。各RS通过区块链网络连接,以共享NTM移动实体信息。NTM移动实体具有网络接入时的实际IP地址,以及由RS分配的代理IP地址,该代理IP地址在其移动过程中保持不变。NTM移动实体发出的基于代理IP地址的通信数据包被转换为实际IP地址,进而进行端到端加密。我们通过加密6LoWPAN报头实现IP移动性和端到端连接。
传统上,当NTMobile系统发生问题时,管理员需远程登录服务器,查看NTMobile服务器守护进程输出的日志文件以确认中继服务器当前形成的中继表。因此,管理员必须逐一检查各个服务器的日志文件以确定问题原因。当问题系统涉及多个节点时,排查过程可能变得非常耗时。
随着NTMobile运行规模的扩大,需要管理的服务器数量增加,迫切需要降低管理负担的方法。
III. 提出的方法
A. 概述
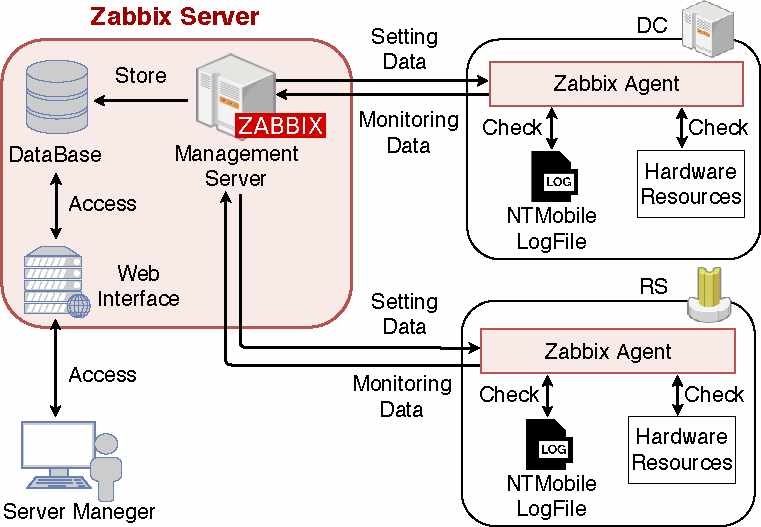
为了实现NTMobile相关信息的可视化及NTMobile服务器的集成管理,我们采用了Zabbix。Zabbix是一种开源的分布式监控解决方案,广泛应用于各类企业系统监控中。
我们开发了所提出的通信中继的监控模块,该模块作为Zabbix的一种守护进程,收集并上报详细的监控统计数据至Zabbix服务器,涵盖中继服务器和注册服务器。此外,还部署了用于收集和管理各类Zabbix代理上报信息的Zabbix服务器。
B. 监控项目
为了实现通信中继,中继服务器(RS)维护一张映射6LoWPAN报头到NTM移动实体代理IP地址的中继表。中继表中的信息对于诊断通信故障至关重要。然而,由于该表存在于运行过程中,管理员无法直接访问。为此,我们利用Zabbix的功能Screen来可视化中继表。Screen是一种用于整合显示多种代理上报的监控信息的功能。

通过监控NTMobile服务器的日志文件和运行中的进程状态,我们利用Zabbix触发器和日志监控项,使Zabbix服务器能够通过预设的规则捕获到服务器上的异常事件信息。该机制一旦触发,Zabbix会主动上报异常信息至前端服务器的监控界面。
此外,Zabbix服务器通过获取NTMobile服务器上运行的进程信息,监控系统中继服务器(RS)中进程的存在性,从而监控NTMobile系统的运行状况。
注册服务器(RS)可能会因NTM移动实体数量增加而导致通信负载上升。在极端情况下,RS可能成为通信瓶颈,导致处理延迟。因此,为监控RS和运行环境的资源使用情况,该管理系统也利用了Zabbix的UserParameter功能来监控RS管理的终端设备数量以及注册服务器管理的NTM移动实体数量。UserParameter是Zabbix的一项功能,用于自定义监控指标的采集。
我们编写了一个程序,从服务器系统文件中读取RS使用的端口信息以及注册服务器管理的NTM移动实体信息,并通过UserParameter向Zabbix上报监控数据。
IV. 实现与评估
该管理系统中采用的模块均使用Go语言编程实现,并通过在私有网络中部署Zabbix服务器、注册服务器(RS)和中继服务器(RS)以及模拟系统运行来进行评估。图2展示了Zabbix管理界面的示例布局。实验结果表明,我们成功实现了监控数据、异常事件信息以及负载状态的实时获取。
表I展示了所提出方法与传统方法的对比。在传统方法中,当NTMobile发生异常时,管理员必须逐一登录各服务器,查阅日志文件以定位问题根源。
| 传统方法 | 提出的方法 | |
|---|---|---|
| 集成日志监控 | 否 | 是 |
| 运行状态的可视化 | 否 | 是 |
| 负载状态监控 | 否 | 是 |
表I 所提出方法与传统方法的对比
具体而言,所提出的方法实现了集成日志监控,使得管理员能够以较低成本监控异常事件的发生。此外,通过采用告警机制和异常信息的自动化收集流程,显著减轻了管理员手动筛选监控信息的负担。在负载状态监控方面,由于能够基于NTMobile的特性动态监测负载情况,相较于传统方法更具优势,有助于提前预测过载风险并提升系统的稳定性。随着被监控服务器数量的增加,服务器管理员无需再逐一登录检查,即可快速定位异常并评估整体负载状况。
图3展示了系统运行时的负载监控界面。在所提出的方法中,监控信息由Zabbix自动采集,因此管理员获取监控信息所需的时间和精力大幅减少。这有效降低了管理员的操作负担。

V. 结论
本文提出了一种基于Zabbix的、适用于基于区块链的NTMobile的服务器集成管理系统。我们证实,相较于传统方法,所提出的方法显著减轻了服务器管理员的运维负担。

















 768
768

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









