






 嘿,大家好,我的名字叫做Egbert。我想和大家一同分享我的作品,就像其他CG爱好者们分享他们的作品那样。
嘿,大家好,我的名字叫做Egbert。我想和大家一同分享我的作品,就像其他CG爱好者们分享他们的作品那样。
一直以来我都想制作一幅机器人的场景,这也就是为什么我突然有了制作机器人大战的悲惨场景这样一个念头的原因。
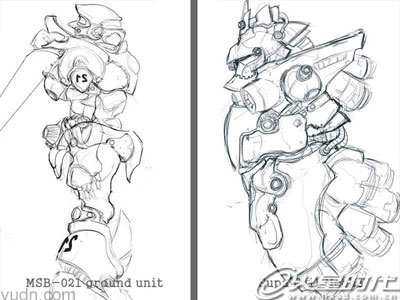
首先,就像大多数艺术家们那样,我先很快地为场景和里面的人物画好素描。

下图是场景的构思图,都是些简单的线条再加上简单的阴影。
之后我画好场景中人物的轮廓。
接下来就该建模了。
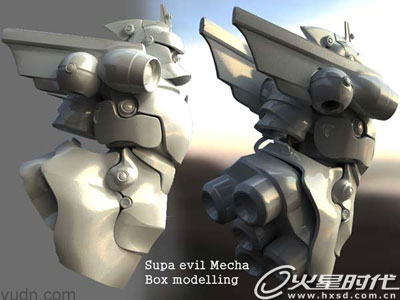
对于建模,我使用了Box建模技术。在我看来这是最简单也是最高效的方法。首先我制作了一张平面图在上面我画出了人物的侧面轮廓,以便使各部分的比例比较均匀。接下来,我开始用正方体来建模,我把它转变成可以编辑的状态。经过一系列的拖放,我终于得到了我想要的模型。(如下图)
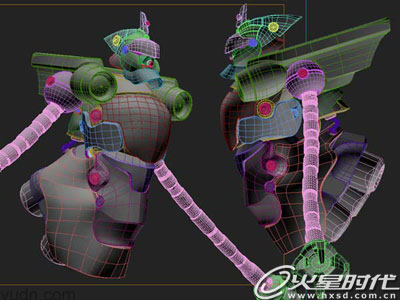
上面三幅图展示地是阴影&线框模式下的2个主要人物。
在开始讲述第二个阶段之前,我想和大家分享一个小技巧,我常用来处理场景复杂度的一个技巧。
场景中总是会有很多的物体,再加上家里的电脑性能不佳。这种技巧需要在可编辑状态下使用到 smoothing group 系统,仿造一些斜角,这样机器人的边缘看上去轮廓鲜明。
那么现在我们就用下面的图形来解释吧。

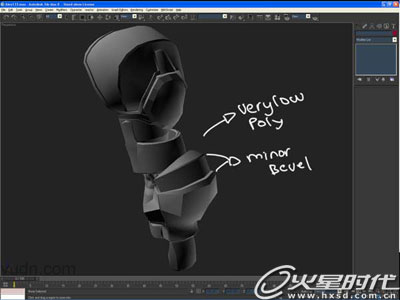
紧接着,我通过多边形勾选出网丝,把它分解为不同的smoothing group ,并给予编号。
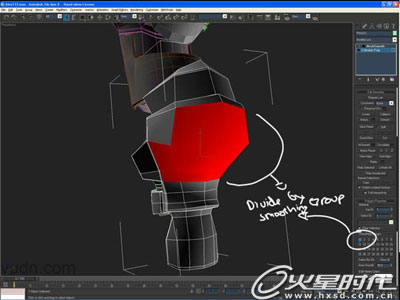
不同的编号所对应的区域不同(参照图中画圆圈的部分)
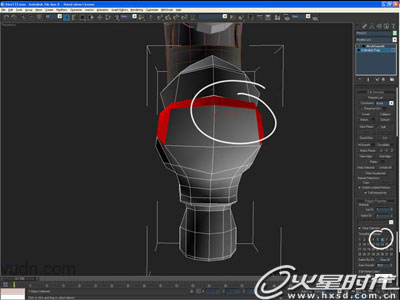
我选择了Meshsmooth命令把 Iteration 改为2,如果你不管它,它看上去又圆又丑。
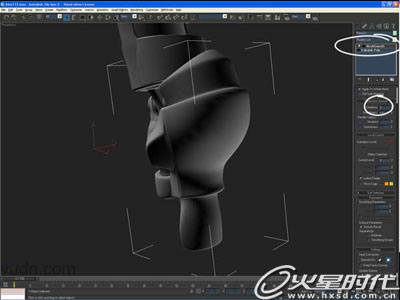
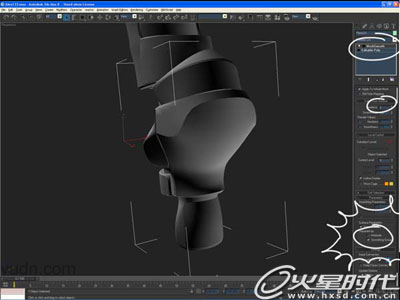
参数检验栏中有个“separate by”选项,你只需要勾选 Smoothing groups 检验栏即可,于是模型的边缘看上去就相当鲜明(当你制作出整个场景,你可以把iteration的参数改为0,把 render value iterations 改为2,因此只有在渲染的时候,物体才会变得平滑)
好了,现在该轮到粘贴的阶段了,(很讨厌但是又需要耐心的步骤)。幸亏max 8 中含有 pelt工具,让我们可以点对点地绘制直线,把UV分开,再把它们均匀地在2D平面图中展开。


我还为MSB制作了来复枪。
所有的纹理和建模完成之后,接着要讲地便是场景代理服务器,设置好相机的角度,光线。
首先测试block 渲染,使用的是较为粗略的机器人多边形模型。
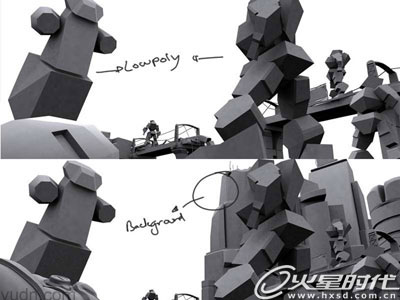
将背景和人物导入图中,这样构思图基本完成。


上面的两幅图是最后的模型,不包括纹理和天空。
对于渲染器,我使用地是 Scanline renderer ,对于室外GI可以使用光线追踪。
对于天空的制作,我将很多天空和云彩的图片混合,在背景上进行 matte paint。
下面看上去很乱,没关系,它一会就会被模型遮盖。
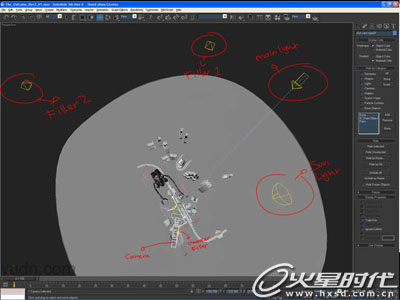
上图是场景的照明和相机的设置
场景使用了两个filler,人物使用了一个filler
最后我在图层上渲染(图层分别有前景层、中景层,远景层、天空),打算在 photoshop中进行色彩/饱和度的调整。
在photoshop中制作了一些色彩扭曲和特效,上图是最后的图像。
感谢您的阅读,希望这篇教程对很多人能有所帮助。
或者您也可以登陆我的个人网站www.bleugraph.com 查询最新信息。
在此还要感谢3D.sk 能提供很多非常有用的纹理和参考图。
更多详情请登陆:http://www.3dtutorials.sk/index.php?id=147&page=1

来自 “ ITPUB博客 ” ,链接:http://blog.itpub.net/9496239/viewspace-942758/,如需转载,请注明出处,否则将追究法律责任。
转载于:http://blog.itpub.net/9496239/viewspace-942758/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









