



 本文指导考研学生在成绩公布后如何行动,包括成绩复查流程、时间及注意事项,对照历年分数线评估自身位置,为复试或调剂做好准备。
本文指导考研学生在成绩公布后如何行动,包括成绩复查流程、时间及注意事项,对照历年分数线评估自身位置,为复试或调剂做好准备。

转载于 软科
大多数招生单位都可以查考研成绩了!出分后,下一步该做什么?小编为大家整理出考研出分后必做的几件重要事项,请大家务必了解清楚。
了解成绩复查时间
查分后肯定是几家欢喜几家愁。有些同学可能对自己的成绩有所怀疑,如果你真的觉得分数和预期差得太大,可以进行成绩复核,对自己负责。
关于成绩复查你需要注意:
1、一定要在规定时间内申请复核,提前或逾期均不受理;
2、受疫情影响,绝大部分高校不接受现场咨询和办理,复查工作线上进行;
3、一般成绩复核只检查考生答卷是否有漏评、加分、登分等错误,不重新评阅答卷;
4、考生本人不得查阅试卷。
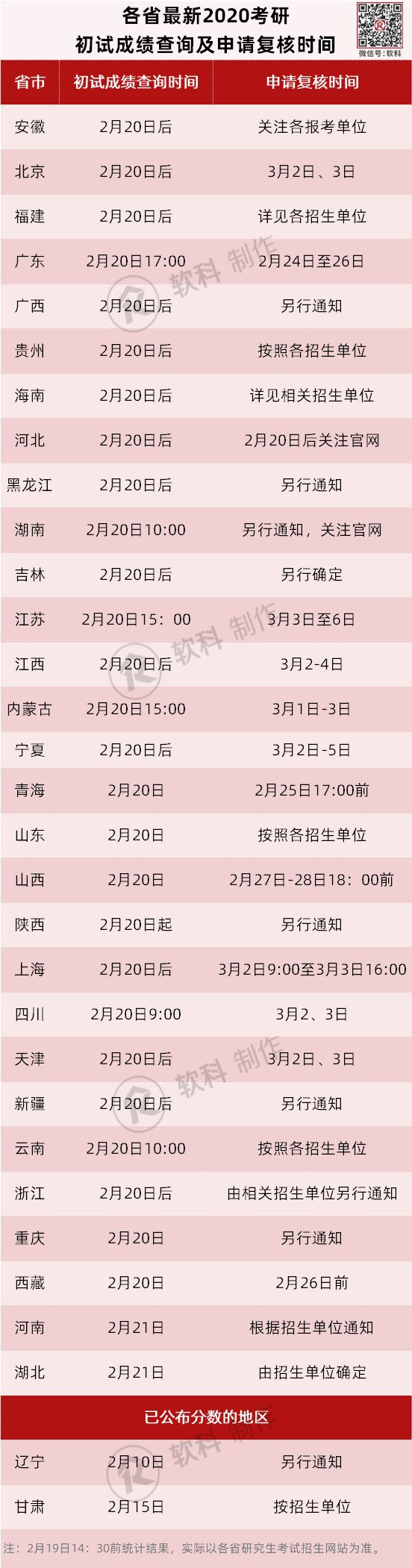
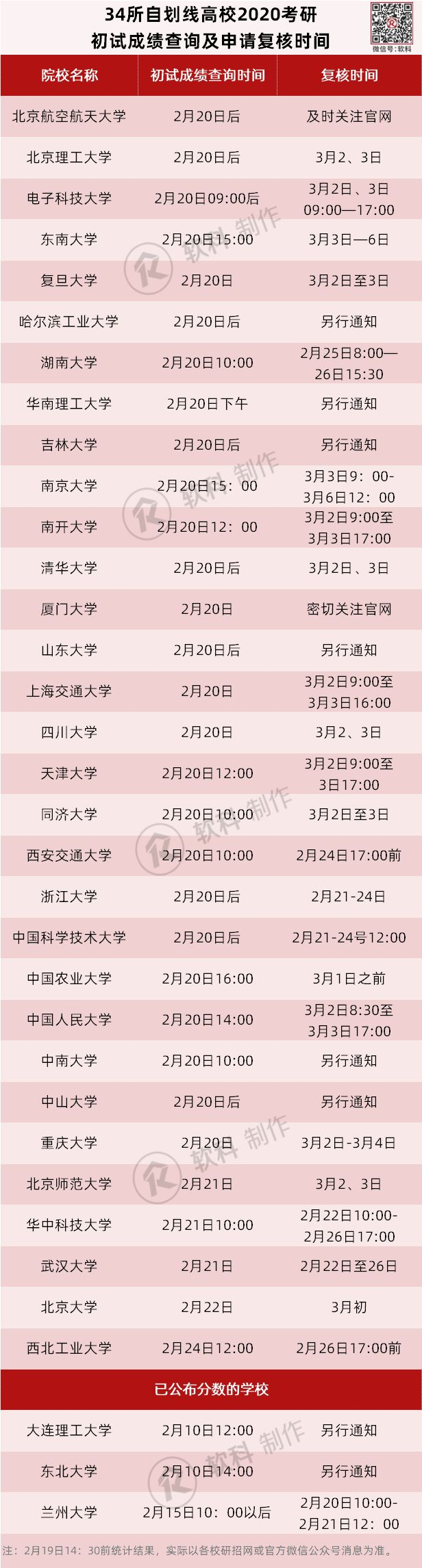
各大高校在通知中都有对复查成绩时间和要求的详细说明,软科小编为大家搜集汇总了各省以及34所自划线高校复查的时间,如果你有复查的需要,一定要密切关注各招生单位发布的消息。
对照历年分数线
因为每年的分数线变化不是特别大,出分后大家可以对比历年的考研分数线,看看自己处于什么位置,准备复试或者关注调剂也好早做准备。
近五年(2015-2019年)学术学位和专业学位国家线趋势:







您还可以在以下平台找到我们




你点的每个在看,我都认真当成了喜欢

















 1738
1738

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









