



 2018年12月,NetCraft发布的Web服务器调查显示,Microsoft、nginx和Apache占据市场前三,其中nginx增长最快,市场份额分别在域名、活跃网站及面向Web的计算机数量上超越竞争对手。
2018年12月,NetCraft发布的Web服务器调查显示,Microsoft、nginx和Apache占据市场前三,其中nginx增长最快,市场份额分别在域名、活跃网站及面向Web的计算机数量上超越竞争对手。

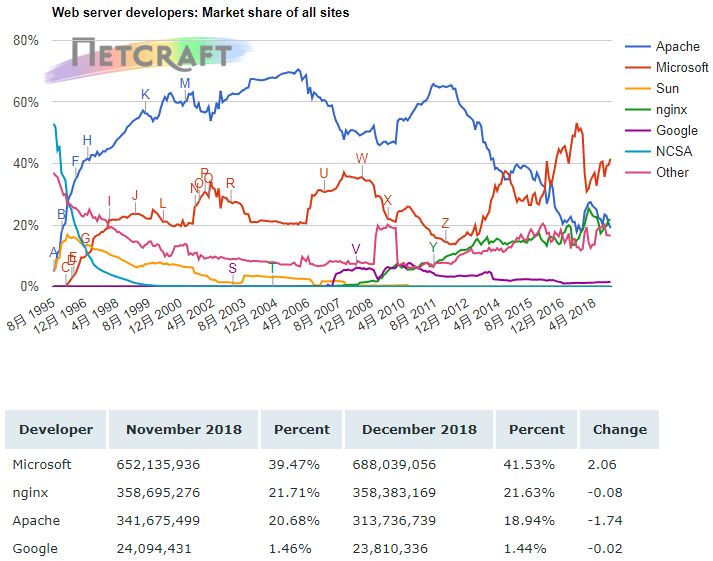
NetCraft 公布了最新的2018年12月 Web 服务器调查报告。毫无意外,就全部网站的市场占有率来看,排名前三的依然是 Microsoft、ngnix 和 Apache。
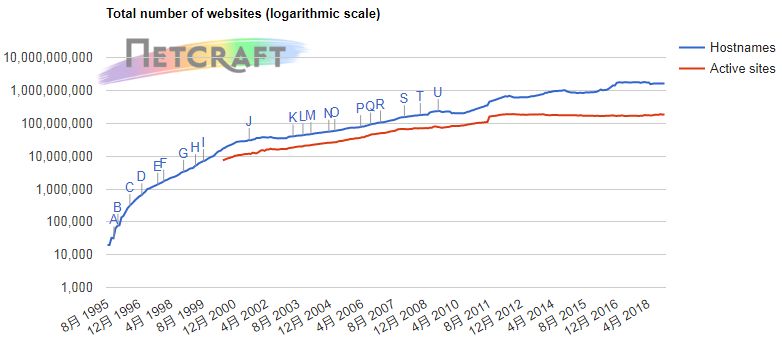
在2018年12月的调查中,NetCraft 收到了来自 1,656,556,205 个站点,227,839,033 个唯一域名(unique domains)和 8,147,795 个面向 Web 的计算机的回应。其中包含新增数据 437 万个站点、109 万个域名和 98.9k 个面向 Web 的计算机。
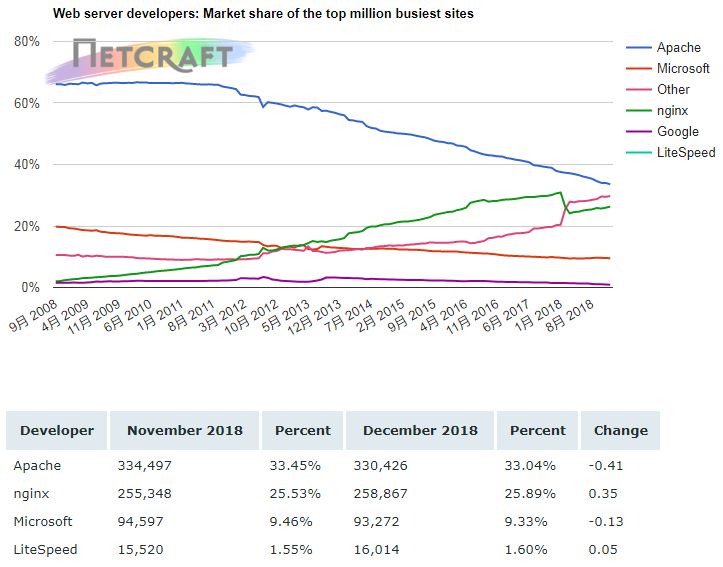
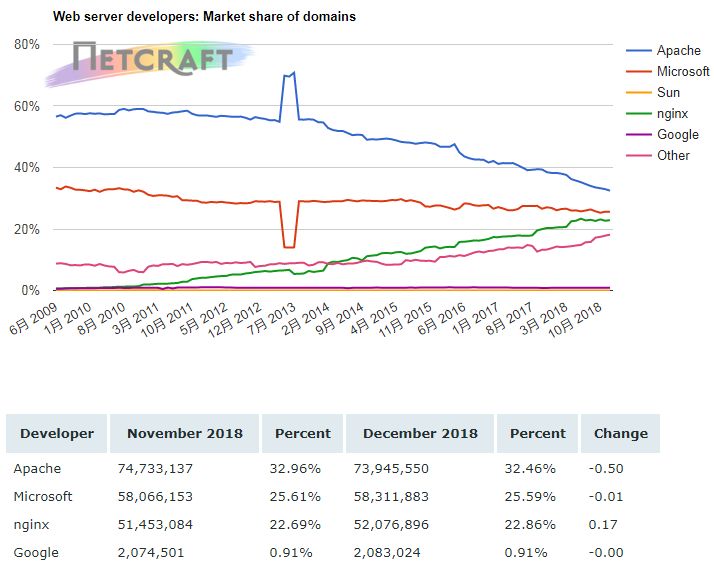
虽然 Apache 的服务器软件在大多数排名中仍然是市场领导者,但其份额继续受到侵蚀,这对它的竞争产品来说是利好消息。在2018年12月,Apache 的旗舰服务器产品 httpd 净减少了 938k 个域名(比上个月减少了 1.27%)、2860 万个站点(-8.43%)和 848k 个活跃站点(-1.49%)。虽然另一个名为 Coyote 的 Apache 产品本月增长了 151,000 个域名(+32.6%),但大部分增长归功于 parking pages,而不是具有独特内容的网站。在过去的几年里,Apache 在百万级别的网站中其份额一直在“稳步”下降,现在已降至 33.04%。虽然目前仍占有最大的份额,但其利润率正在迅速萎缩,其主导地位可能会受到 nginx 在一年内的挑战。
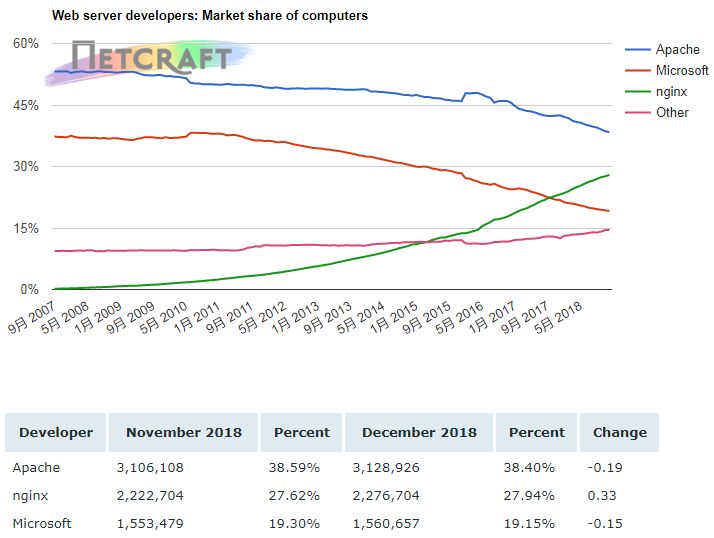
尽管包含这些损失,但运行 Apache 软件的面向 Web 的计算机的数量确实在继续增长,本月增加了 22.8k (+0.73%)。
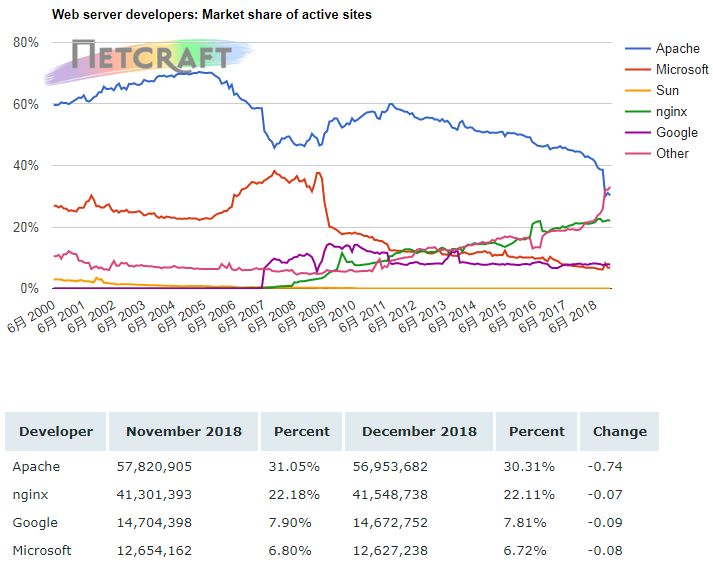
nginx 作为增长最快的服务器软件,本月的域名数量增加了 624k (+1.21%),还可以看到在活跃网站中增加了 24.7 万 (+0.60%) —— 而微软和 Apache 在两个领域的数据均出现下降的趋势。此外,我们也看到 nginx 在面向 Web 的计算机的数量也有大幅增加,nginx 现已被 228 万台面向 Web 的计算机使用,在过去的12个月中增长了 39.9%,而 Apache 和微软同期的数据表现分别为 4.98%和 1.93%。nginx 在11月份发布了两个新版本,修复了三个 CVE 漏洞,并引入了一些小功能和错误修复。
而在站点总数方面,微软的服务器软件拥有最大的市场份额。现在有超过 6.88 亿的网站,比 nginx (3.58亿) 和 Apache (3.14亿) 的网站数量更多,占市场份额的 41.53%。在本月微软增加了 3590 万个站点和 246k 个域名。亚马逊 (+146k) 和 GoDaddy (+189k) 的域名增长大部分都在增加。此外,微软目前支持全球百万 TOP 级别网站的 9.33%。微软全年的百万 TOP 级别网站数据有所波动,本月略有下降,降了 0.13%,但全年12个月只下降了 0.30%。
下面是相关数据展示:
网站总数:
针对全部网站的市场份额:
针对活跃站点的市场份额:
针对百万级别的商业站点:
面向计算机的市场份额:
针对域名的市场份额:
更多数据请查阅报告详情:
https://news.netcraft.com/archives/2018/12/17/december-2018-web-server-survey.html
Netcraft 公司官网每月公布的调研数据(Web Server Survey)已成为当今人们了解全球网站数量以及服务器市场份额情况的主要参考依据,时常被诸如华尔街杂志,英国 BBC,Slashdot 等媒体报道或引用。
声明:本文经授权转自开源中国,作者局长。
热 文 推 荐
年度重磅:《AI聚变:2018年优秀AI应用案例TOP 20》正式发布
print_r('点个好看吧!');
var_dump('点个好看吧!');
NSLog(@"点个好看吧!");
System.out.println("点个好看吧!");
console.log("点个好看吧!");
print("点个好看吧!");
printf("点个好看吧!\n");
cout << "点个好看吧!" << endl;
Console.WriteLine("点个好看吧!");
fmt.Println("点个好看吧!");
Response.Write("点个好看吧!");
alert("点个好看吧!")
echo "点个好看吧!"
 喜欢就点击“好看”吧!
喜欢就点击“好看”吧!

















 668
668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









