



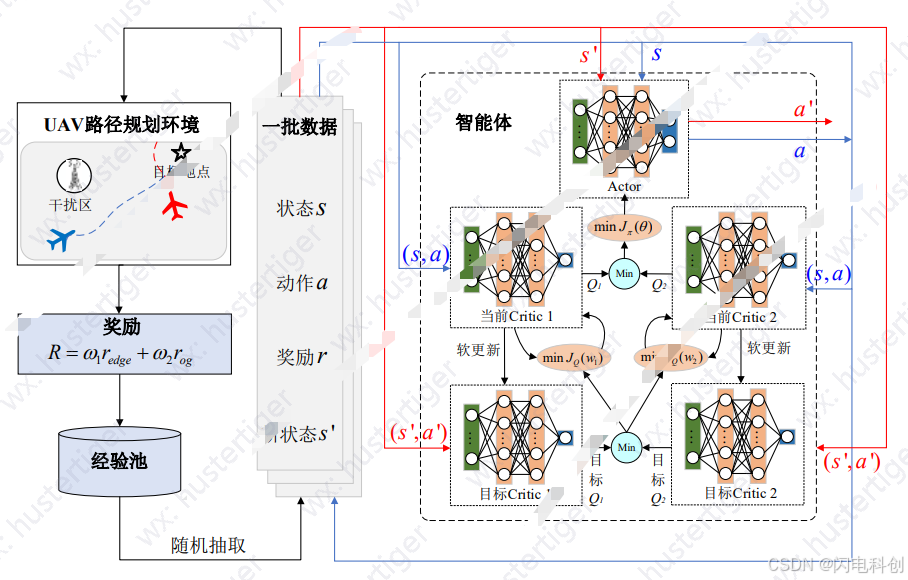
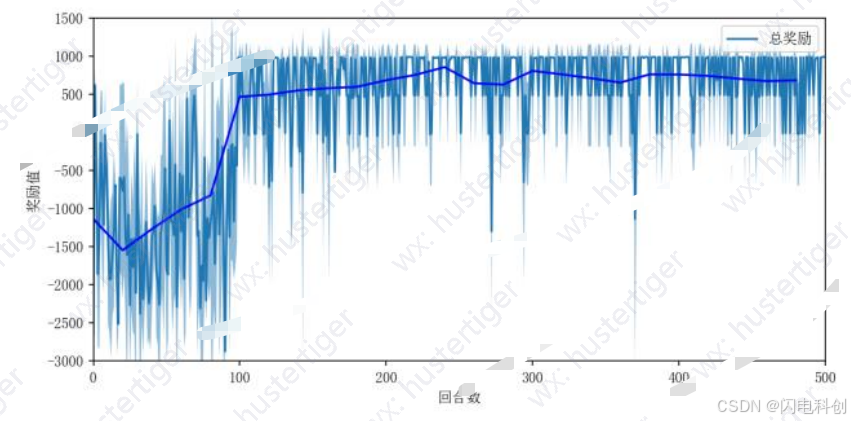
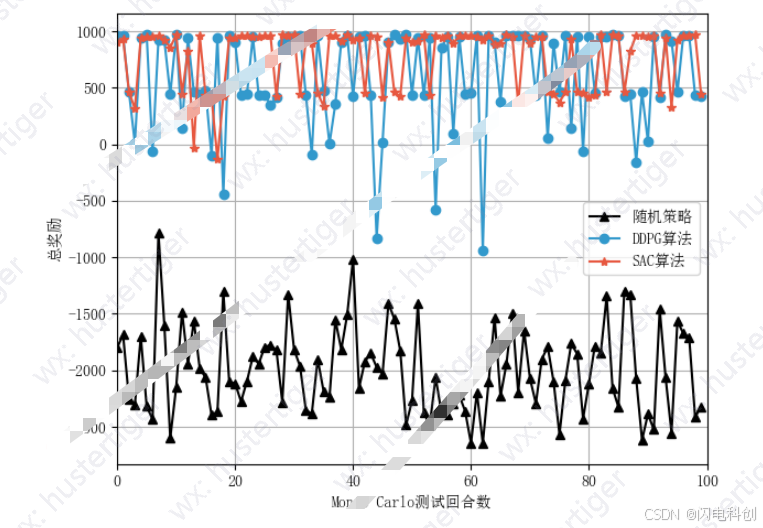
首先开发了一个针对空域场景中无人机路径规划的强化学习环境,该环境包含静态障碍物、动态障碍物和目标位置。其次将无人机路径规划问题建模为一个带约束的马尔可夫决策过程,考虑了无人机的动力学方程及其避障要求。最后设计了相应的奖励函数,采用SAC算法迭代寻求该问题的近优策略,并通过蒙特卡洛测试对算法进行了分析。
首先开发了一个针对空域场景中无人机路径规划的强化学习环境,该环境包含静态障碍物、动态障碍物和目标位置。其次将无人机路径规划问题建模为一个带约束的马尔可夫决策过程,考虑了无人机的动力学方程及其避障要求。最后设计了相应的奖励函数,采用SAC算法迭代寻求该问题的近优策略,并通过蒙特卡洛测试对算法进行了分析。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























