



 本文详细记录了作者在夜间安装ROS Kinetic的全过程,包括遇到的各种bug及解决过程,从初次尝试sudo apt-get install ros-kinetic-desktop到最终完成桌面完整版的安装,再到slam-gmapping的配置,历经数次尝试。最后,成功运行小乌龟示例程序,为后续机器人程序设计奠定基础。
本文详细记录了作者在夜间安装ROS Kinetic的全过程,包括遇到的各种bug及解决过程,从初次尝试sudo apt-get install ros-kinetic-desktop到最终完成桌面完整版的安装,再到slam-gmapping的配置,历经数次尝试。最后,成功运行小乌龟示例程序,为后续机器人程序设计奠定基础。
本文主要是贴图,截图简述安装过程,安装了一个晚上,刷各种bug,翻山越岭,身心疲惫,是个令人难忘的历程!
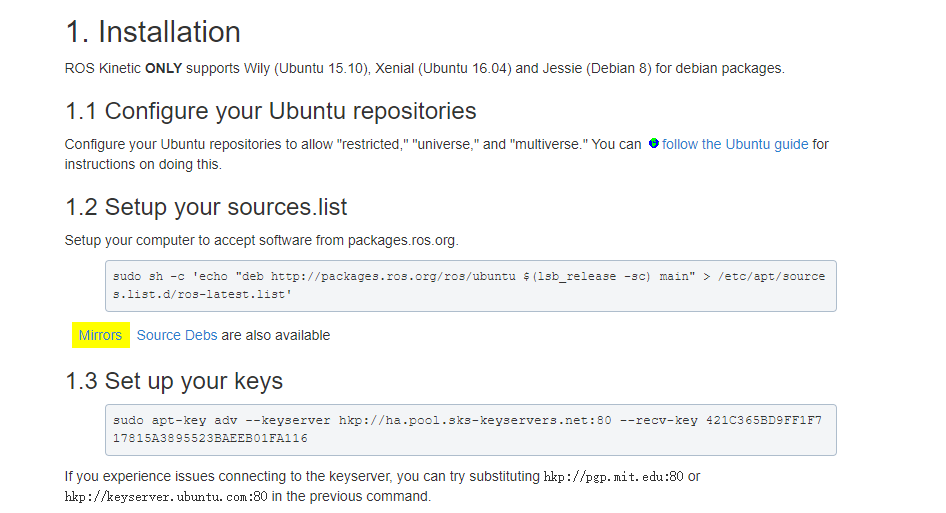
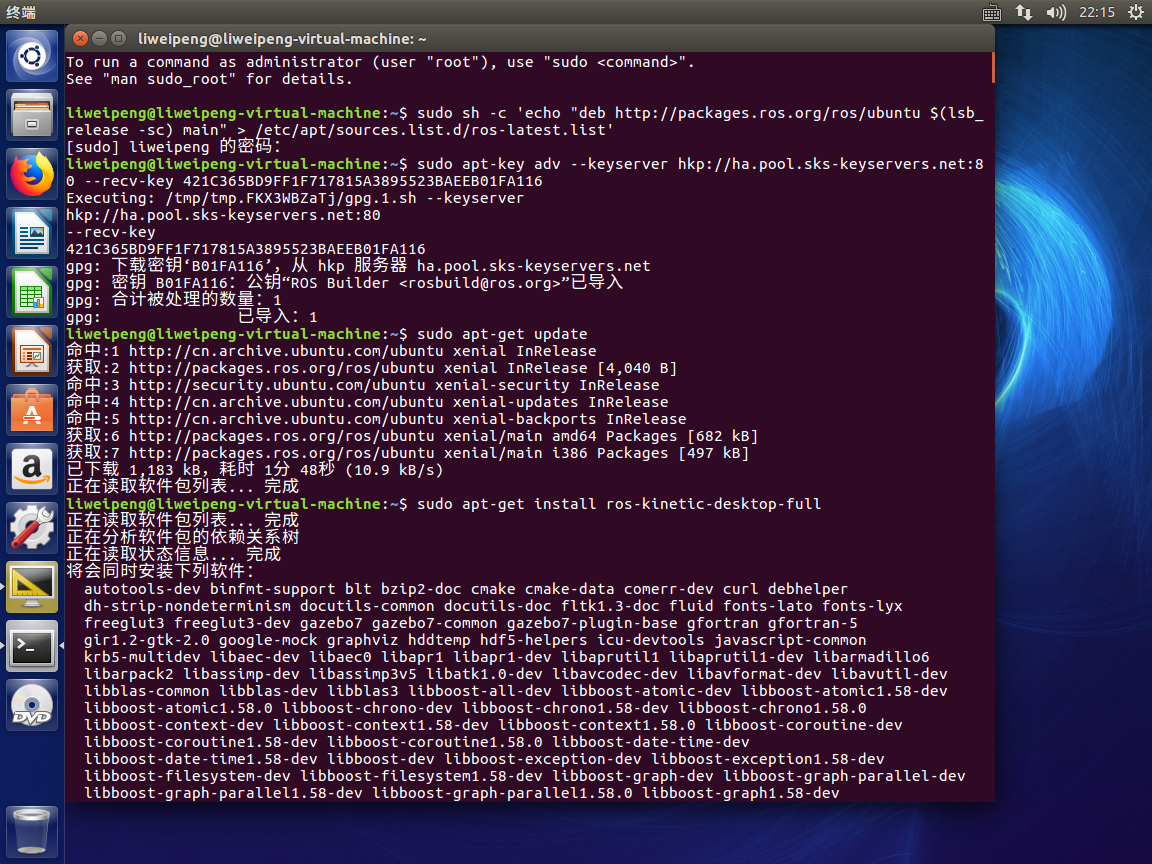
完成1.1-1.3的内容
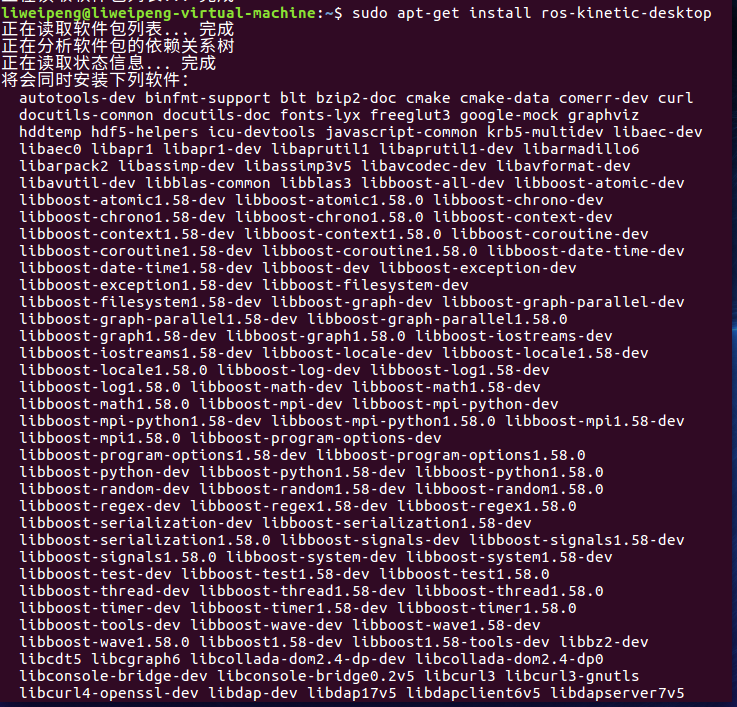
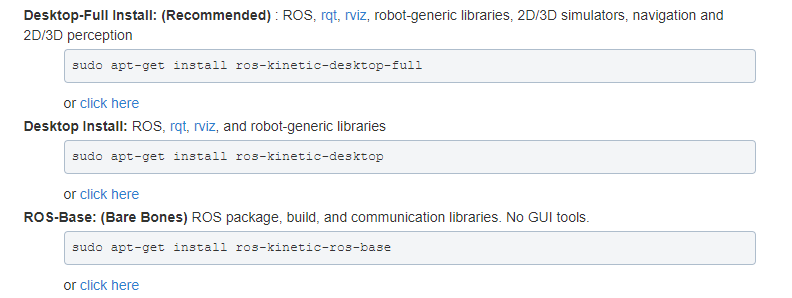
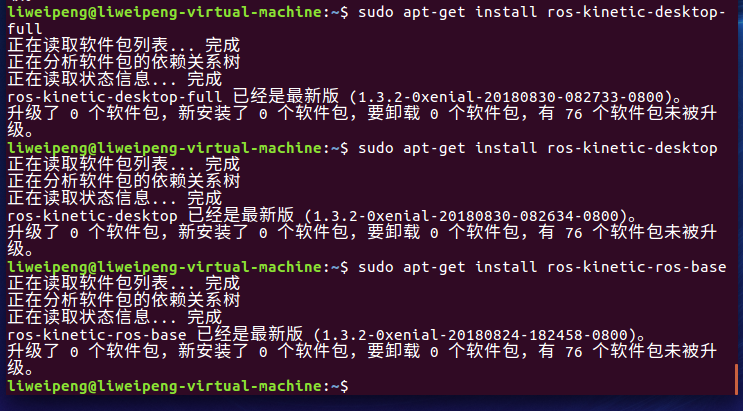
运行了一次sudo apt-get install ros-kinetic-desktop,第二次运行:

运行了一次sudo apt-get install ros-kinetic-desktop-full,第二次运行:
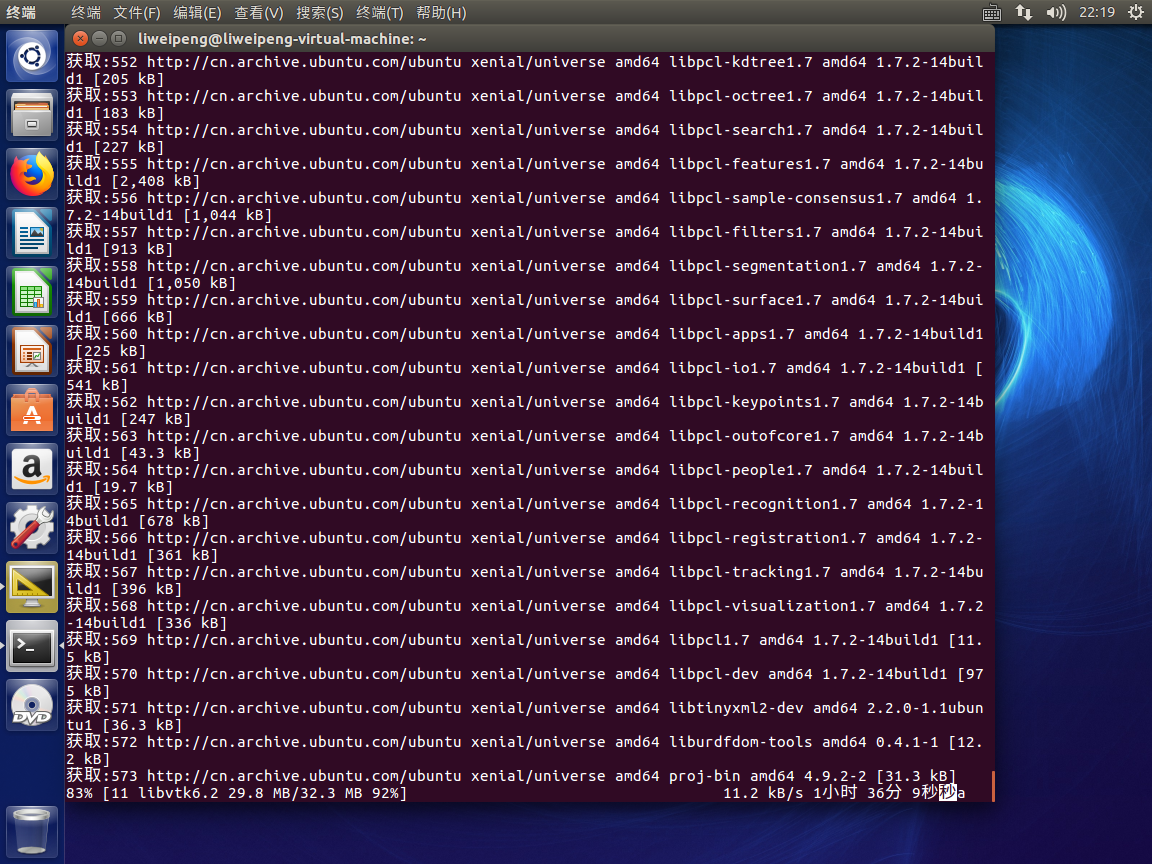
第三次运行sudo apt-get install ros-kinetic-desktop-full:
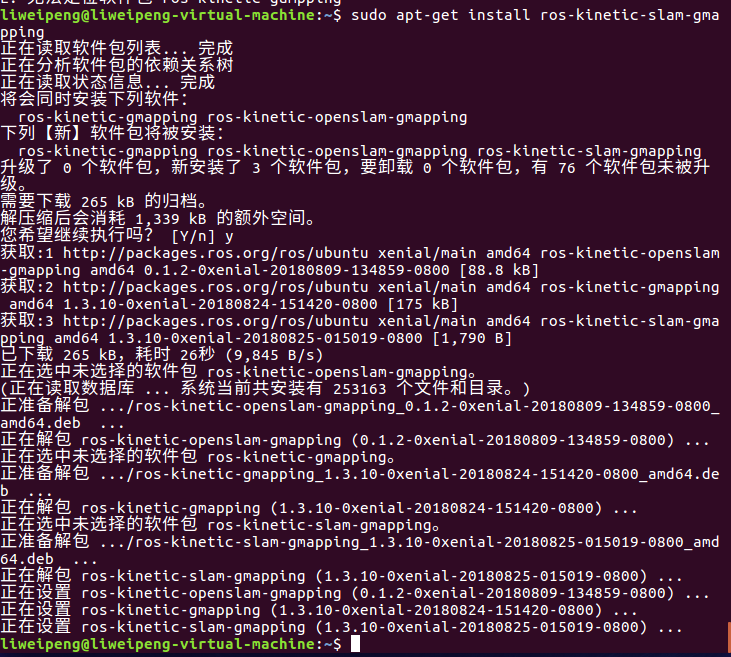
运行sudo apt-get install ros-kinetic-slam-gmapping:
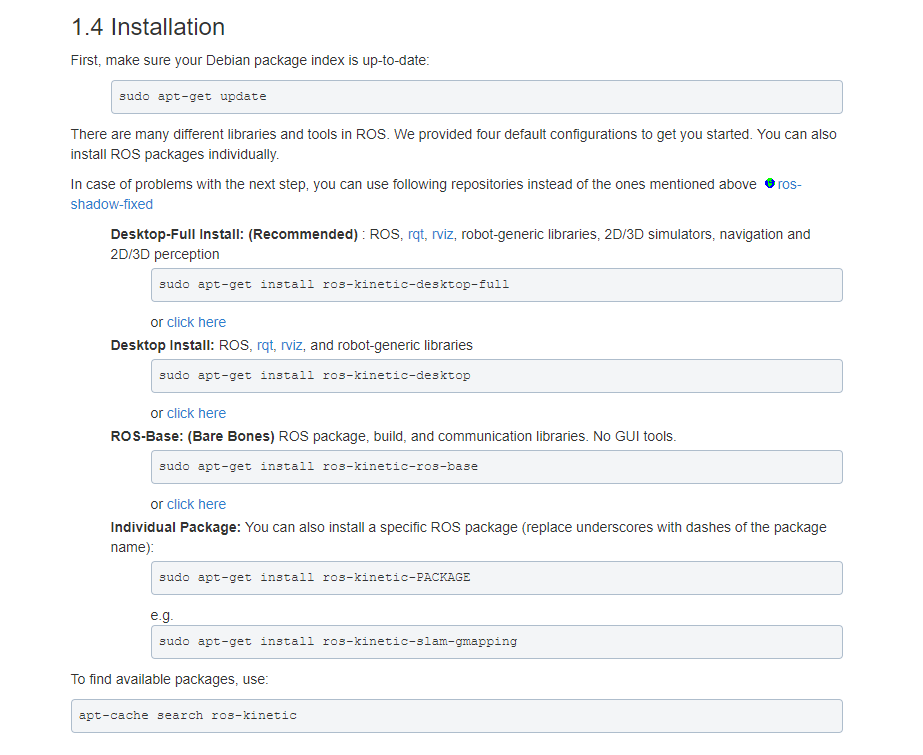
至此完成1.4的内容:
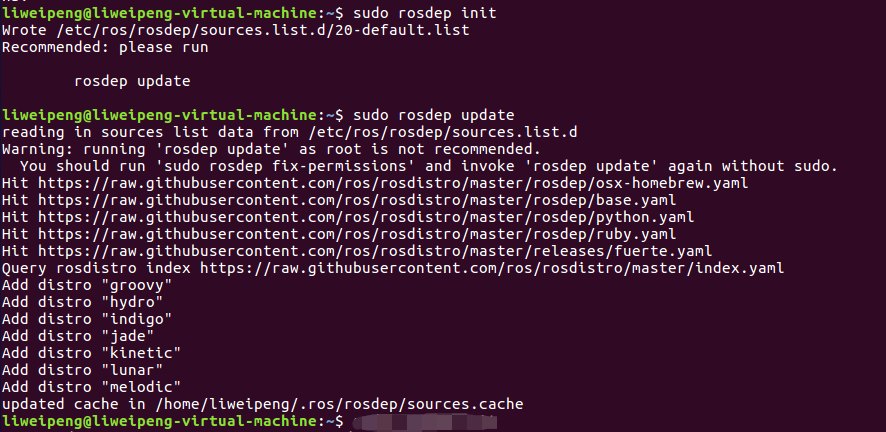
完成1.5

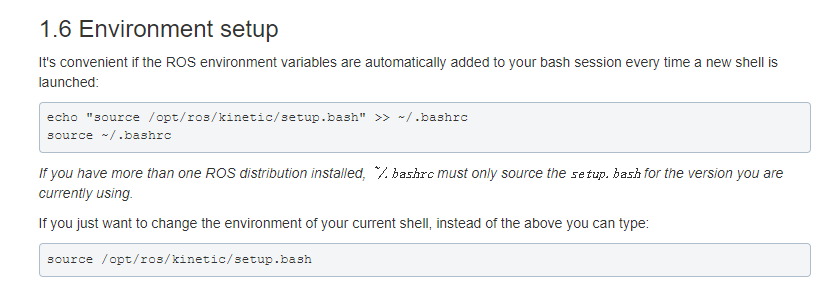
完成1.6


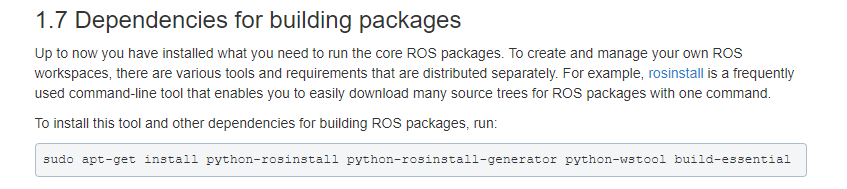
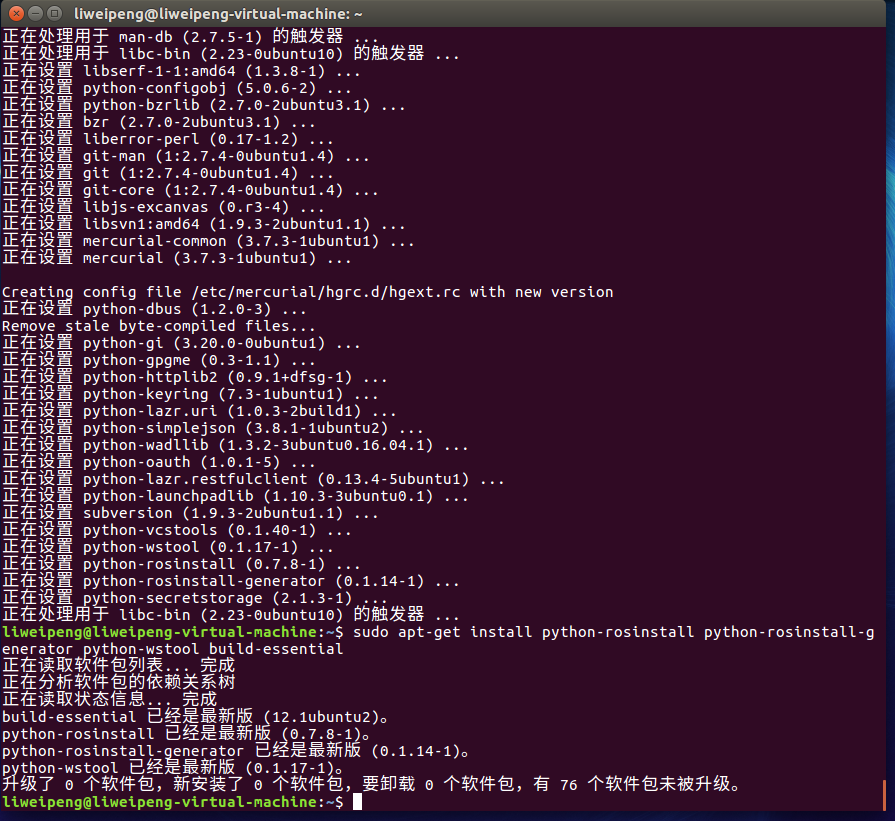
完成1.7
好了,操作到这里基本就完事了,现在可以开始跑机器人程序设计_ROS_note1里面的小乌龟的例子了。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









