




1. LIN 总线
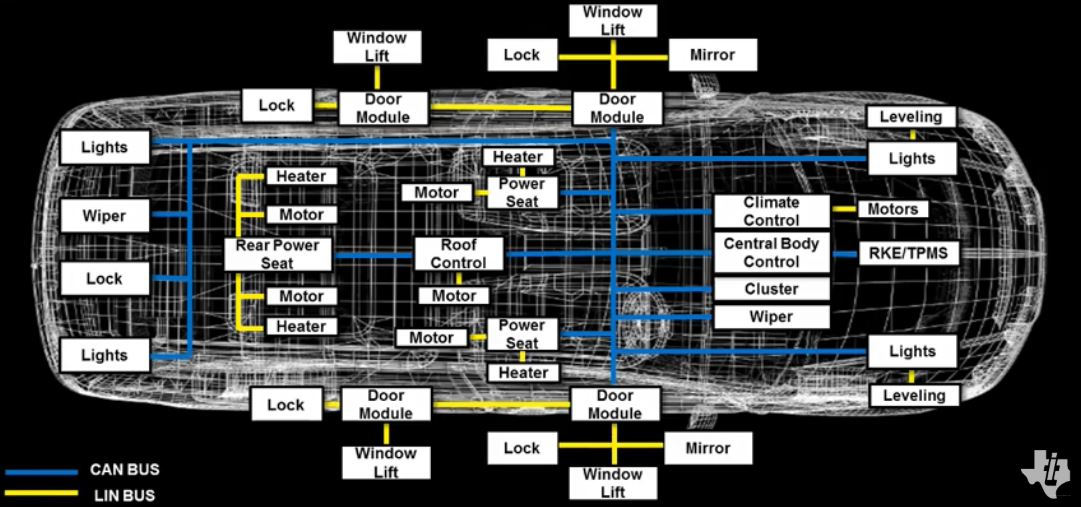
LIN 协议是Local Interconnect Network的简称。它经常被应用于CAN总线的附属线路(sub-bus)。 下图是车辆电子系统里CAN和LIN的分布。 LIN 相对于CAN来说主要用于控制车窗,镜子等一些非关键部件。关于CAN和LIN的主要区别,请参照第二部分。
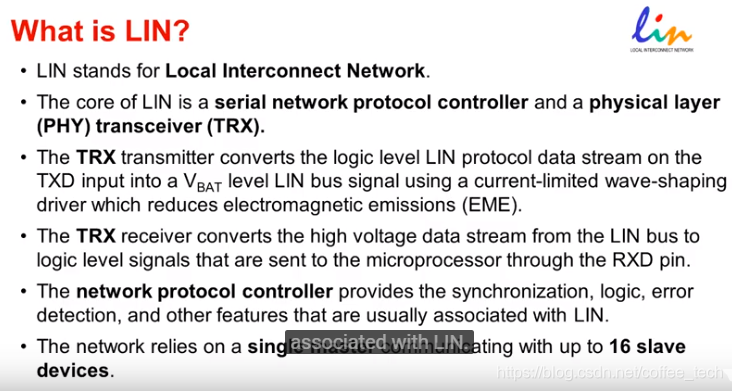
LIN的通信包括两部分LIN master和LIN slave. 单线,通信速度为20kbps. 一个master 可以同时和最多可以和16个slave通信。
从硬件上讲的话, LIN芯片最主要是包含两部分serial network protocol controller(串行网络协议控制器)和 physical layer transceiver (物理层收发器)
serial network protocol controller(串行网络协议控制器): 用于同步,逻辑控制,错误检测等等
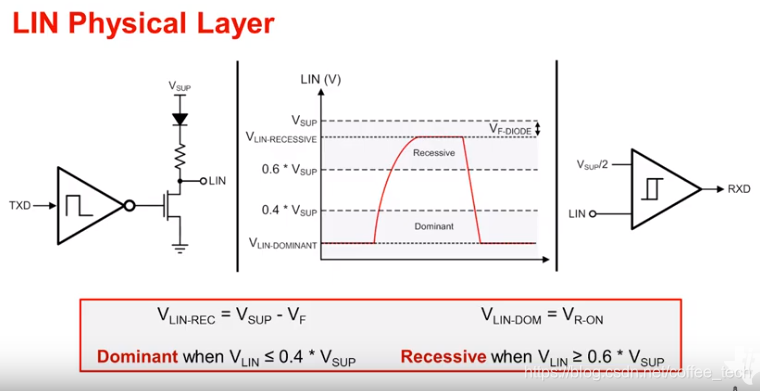
physical layer transceiver (物理层收发器): 主要用于在收发时候LIN协议逻辑电平和模拟电平之间的转换
逻辑电平转换为模拟电平之后,和CAN总线一样,分为Dominant和Recessive。 以下为如何定义Dominant 和 Recessive电平。
LIN的数据报文主要有以下五部分组成. 其中 1,2,3 是由master生成的.4,5 可以由master或者slave生
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









