



 本文详细对比了Python中的input和raw_input函数的区别与应用场景。input函数将用户输入视为Python表达式评估,而raw_input则直接获取原始字符串输入。文章推荐在不需要特别处理的情况下使用raw_input以避免不必要的语法错误。
本文详细对比了Python中的input和raw_input函数的区别与应用场景。input函数将用户输入视为Python表达式评估,而raw_input则直接获取原始字符串输入。文章推荐在不需要特别处理的情况下使用raw_input以避免不必要的语法错误。
比如如下代码:
name = raw_input("what is your name?")
print ("hello"+ name)
运行后,输入值发现:
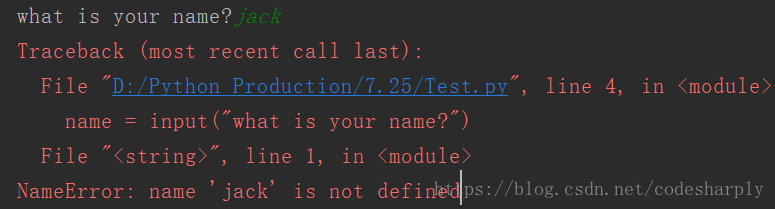
这是因为
input函数:
input函数会假设要求用户输入的是合法的Python表达式,就是说,数值3,乘法3*5,字符串“name”或者'name';但是如果你输入的字符串直接是name,那么就是错误的。
比如要求输入人的年龄的时候,就可以用input函数;但是要求一个人输入名字的时候,本来直接输入,但是这里需要要加上双引号,就会感觉很麻烦。
raw_input函数:
raw_input函数把所有输入都当做原始数据,放入到字符串中,可以输入任何字符(当然包括上面所说的x=3、name)。
raw_input就会从键盘中读取一切数据,这样就会比较方便
因此上述错误的解决方法有两种:
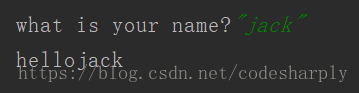
1.输入名字时,打上双引号,输入正确的指令
2.使用raw_input()来进行数据的输入
name = raw_input("what is your name?")
print ("hello"+ name)
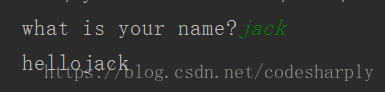 输入就会更加方便
输入就会更加方便
建议:对input无特殊要求时,建议尽量使用raw_input函数。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









