



1
诞生和发展
我虽然20岁不到, 可已经是满脸沧桑了, 这不能怪我, 你们人类的IT技术发展的实在太快。很多技术别说20岁了, 10岁,甚至5岁都活不到就销声匿迹了。
20年来, 我有着波澜壮阔的人生, 曾经在多个领域占据统治地位, 但如今这些领域已经被侵蚀得不成样子了。
我的诞生可以算是一个分水岭,在此之前,程序之间想交换数据, 都用自定义的格式, 千奇百怪,无所不有,比如:
[978-7-229-03093-3|三体|刘慈欣|中国最牛的科幻书|38.00]
{978-7-229-03093-3 三体 刘慈欣 中国最牛的科幻书 38.00}
{(978-7-229-03093-3) (三体) (刘慈欣) (中国最牛的科幻书) (38.00)}
这些字都认识, 意思也能猜个八九不离十, 但是非要问精确的含义是什么,只有互相交谈的两个程序知道了, 如果第三个程序也想掺乎进来, 必须得问问码农每个字段到底是什么意思才可以。
现在好了, 你只要看看用我XML来描述,就立刻明白了:
<book>
<isbn>978-7-229-03093-3</isbn>
<name>三体</name>
<author>刘慈欣</author>
<desc>中国最牛的科幻书</desc>
<price>38.00</price>
</book>
我成为了一个通用的世界语,无论你是Java, C#, Python...... 只要你能读取XML的格式, 就可以互相交谈, 很明显这种简单的格式解析起来没啥难度, 一大批支持各种语言的XML解析器如雨后春笋般冒了出来。
我们是个大家族, 比如XML DTD 和 XML Schema , 这哥俩专门负责对XML进行校验, 一个程序拿到一个XML数据以后,只需要用DTD/Schema 校验一下,就知道这个数据是不是缺胳膊少腿, 如果真有问题, 就不用费心继续读取了。
还有号称小李飞刀的XPath, 能够迅速而精准地从一大段复杂的XML中刺中特定的节点,根本不用你费心费力地一层一层的寻找。
百变大师XSL/XSLT , 能轻松地把XML转换为另外一种表示和格式,例如HTML, 功能之强大令人瞠目结舌。
我们一大家子互相扶持,迅速地征服了数据交换和传输这一领地。
不仅如此,我们家族还成功地和Java 结盟, 更上一层楼。 一个是跨平台的语言, 另外一个也是跨平台的语言,你说是不是绝配?
2
攻城掠地
除了数据传输以外, 我最早在配置文件领域取得了成功, 说道配置文件, 之前都是简单的key=value 这样的属性文件, 描述简单的结构还行, 对于复杂的结构就力不从心了, 我XML就不同了, 全称是‘Extensible Markup Language’ , 可扩展性极强,标签随意定制,即使是在复杂的逻辑下,我XML也是得心应手,我给你看个web.xml的例子吧:
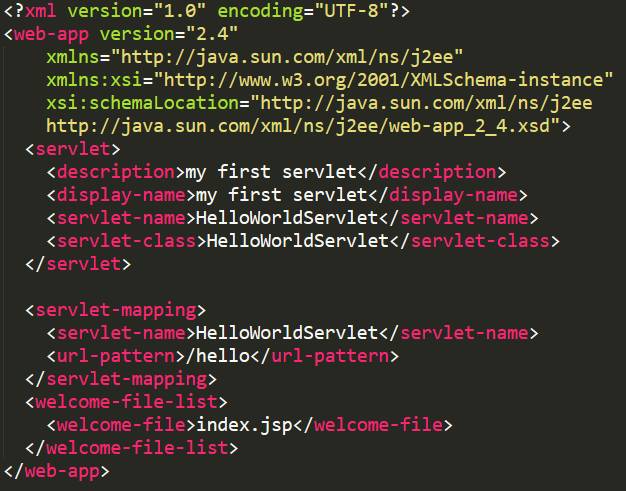
人民群众的眼睛是雪亮的, 看到我的可扩展性这么强悍,想定义啥tag就定义啥tag , 纷纷从属性文件倒戈, 什么Struts , Spring ,Hibernate , MyBatis 写配置文件时不约而同地选择了我。
这是个巨大的胜利啊, 除了这个之外,我还成功地进入了新的领域, 还是先看个例子:
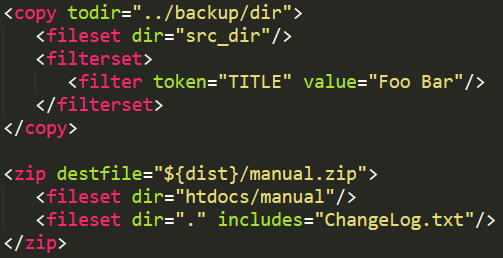
这个代码片段中<copy>是表示把文件从一个地方复制到另外一个地方。 <zip>是把文件打成zip包 , 是不是一目了然?
这其实是Ant的一段代码, 你一看就明白是怎么回事了, 所以我非常适合描述任务和流程, 因为其中有复杂的控制,其实你想想,Ant是用我的标签定义了一套自动化处理的‘语言’出来, 程序员可以用这个‘语言’ 写出非常复杂的程序出来, 厉害吧?
还有一个很好的例子, 10多年前各大厂商鼓噪SOA, Web 服务开始流行, 它也要做成跨平台的,需要一种方式来描述一个Web服务有什么操作, 调用这个操作需要什么输入参数, 有哪些输出参数等等 。 我一想这简直就是为我量身定制的啊。我轻轻松松就可以搞定:”
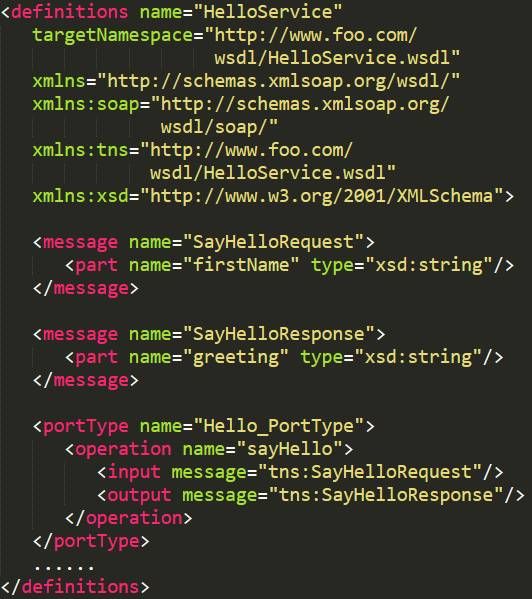
虽然有些冗长, 但是也没办法, 我那tag 就是成对出现的啊。
我没有想到的是,程序员也把我应用到了界面描述的领域, 其实界面的生成是个大老难的问题, 人类曾经走了两个极端, 一个是把界面布局,控件等信息都塞到一个文件当中, 这个文件通常不是人直接可读的,而是由编辑器来装载的, 例如VB。 还有一个极端就是完全用代码来生成界面, Java Swing 就是杰出的代表。
既然我的描述能力这么强大, 完全可以拿来描述界面啊, 就像描述任务和流程一样。 然后程序或者框架读取XML,把界面生成不就可以了。
要想有直观认识的话可以看看Android, 还有早期Firefox 的XUL , 微信的XAML都是用我来描述界面的。
总而言之,我在数据交换, 配置文件, 任务和流程的描述, Web服务的描述, 还有界面描述领域都取得了成功, 不是自夸, 这个时候确实是我人生的巅峰
3
蚕食
好景不长, 俗话说物极必反,盛极必衰。 在数据传输和数据交换这个领域, 很快被Javascript 和 JSON 撕开了一个口子, 他们充分地利用了人们对冗余标签的不满, 搞出了这样简洁的格式:
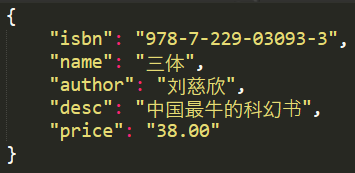
简洁,数据量小, 方便传输, 更重要的是Javascript 解析起来非常方便。
我说你们这是乱搞, 没有schema , 你这数据怎么验证啊?出错了怎么办?
他们告诉我, 老先生,您想多了,我们用JSON做同一个应用内的数据传输, 从浏览器到服务器, 或者从App到服务器, 同一个公司的人, 只要接口定义好,大部分情况下都没问题,不用费心做验证, 即使数据被损坏,抛出错误就行了啊。
我表示无语, 只能眼睁睁地看着JSON攻城掠地, 把数据传输这一块高地慢慢地蚕食了。
再说说配置文件吧, 原来喜欢我的码农开始抱怨, 他们说XML描述又臭又长,说简短的配置文件还可以, 稍微长一点看起来头都晕了。
怎么办? Spring, Hibernate 这帮家伙见风使舵, 纷纷转向Java注解。XML文件配置能干的活, Java注解也可以做, 甚至干的更好, 于是我又流失了一大批拥趸。
SOA也好景不长,逐渐没落,有个叫Roy Thomas Fielding的家伙 发表了一篇论文, 提了一个叫做RESTful风格的Web架构出来, 搞得人心浮动, RESTful风格的服务开始大行其道, 使用传统Web 服务的人越来越少, 既然没人用Web 服务, 也就没人使用XML来写WSDL, 于是这块阵地也慢慢的丢失了。
屈指一算, 我丢失了三块重要的阵地, 很快从巅峰滑落了。
不是我不明白,是技术变化实在快,现在唯一能安慰我的就是在复杂的结构、任务、流程的描述方面, 我还有着不可替代的作用。
如果有一天出现一门全新的技术把我替代了, 我就老老实实让位, 去养老院找我爷爷GML(Generalized Markup Language ) 养老去吧。
你看到的只是冰山一角, 更多精彩文章,请移步《码农翻身文章精华》
有心得想和大家分享? 欢迎投稿 ! 我的联系方式:微信:liuxinlehan QQ: 3340792577
码农翻身
用故事讲述技术


















 9372
9372




 到【灌水乐园】发言
到【灌水乐园】发言







