



 本文详细介绍了Java环境及Eclipse IDE的搭建步骤,包括JDK安装与配置、编写并运行第一个Java程序、创建Java项目等内容。同时,还提供了基本的Java语法学习指导和实践练习。
本文详细介绍了Java环境及Eclipse IDE的搭建步骤,包括JDK安装与配置、编写并运行第一个Java程序、创建Java项目等内容。同时,还提供了基本的Java语法学习指导和实践练习。
为什么叫贵在折腾呢? 因为我们要折腾一下Java 环境和Eclipse环境, 这一块群里边有无数人在问各种各样的问题。 1. Java 环境搭建
1.1. 下载安装JDK, 设置环境变量和Path
下载地址:http://www.oracle.com/technetwork/java/javase/downloads/index-jsp-138363.html
1.2 写一个小程序HelloWorld.java , 在命令行编译运行, 输出 hello,world !
1.3. 在HelloWorld.java 加上包名: package com.coderising; 在命令行编译运行, 再次输出 hello world !
1.4. 把你的HelloWrold.java 使用jar 命令 打成hello.jar, 然后运行, 再次输出 hello world !
1.5. 给你的类和方法加上注释
2. Eclipse环境搭建 (群主会视频演示)
2.1 下载 Eclipse IDE for Java EE Developers
下载网址: http://www.eclipse.org/downloads/
2.2 熟悉Eclipse
设置你的workspace 为 UTF-8 编码
设置Java 编辑器的字体为你喜欢的字体
在Java EE, Java , Debug 三个视角(Perspective )之间切换
显示“Servers”视图
使用Debug
在Eclipse中设置多个JRE
尝试修改编译器的编译级别
2.2 用Eclipse 新建一个Java项目 ,名称JavaLearning
在该项目编写类HelloWorld.java , 同样输出hello world!
2.3. 在Eclipse 中写一个JUnit 测试程序,名称为HelloWorldTest , 对你的HelloWorld进行测试
3. 自学和作业
3.1 自学Java的基本数据类型,运算符,流程控制
基本数据类型: int ,float, double ,String
运算符: =,==,||, & ,++, --....
流程控制 if else, while ,for , break, continue, switch ...
3.2 导入群文件(240247555 ) 中的JavaLearning.zip到你的eclipse工作区, 导入以后,应该像这个样子:
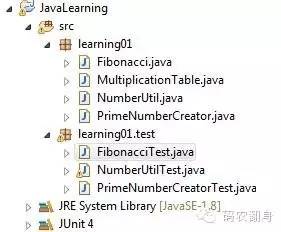
在该项目中, 包含了4个需要实现的类及其对应的JUnit测试用例
你需要完成这4个类, 并且通过测试用例
注意:一定要通过测试用例, 否则作业就不算完成
这4个类包含如下功能
给定最大值,计算素数数列。
给定最大值,计算 斐波拉契数列。
找到一个数组的最大值。
对一个四位整数进行翻转操作
输出9*9口诀表
3.2 重要!!!!
把Eclipse中的项目导出成zip文件,以自己的名字命名,上传到群文件中, 老师会检查作业
3.3 作业点评
给大家展示好的代码实现
4. 思考题
4.1 为什么Java 能够实现跨平台,能实现Write once , run anywhere ?
4.2 JRE和JDK有什么关系?
4.3 Java SE, Java EE , Jave ME之间是什么关系?
4.4 Android平台和Java 的关系?
4.5 为什么要设置JAVA_HOME?, 为什么要把<jdk目录>/bin 加入到Path中?
4.6 Eclipse 的视角(Perspective)和视图(View)之间有什么区别?
注: 不强求提交思考题作业, 如果有人感兴趣, 也可以把自己的答案写成文本, 上传到群里去。

















 395
395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









