



 本文详细介绍了如何使用JMeter进行性能测试,包括安装与运行、设置语言、添加线程组模拟用户并发、配置HTTP请求、添加请求头、聚合报告查看TPS等关键指标,以及结果树查看HTTP响应结果,最后清理测试结果准备下一轮测试。
本文详细介绍了如何使用JMeter进行性能测试,包括安装与运行、设置语言、添加线程组模拟用户并发、配置HTTP请求、添加请求头、聚合报告查看TPS等关键指标,以及结果树查看HTTP响应结果,最后清理测试结果准备下一轮测试。
一、安装并运行:
下载Jmeter之后解压。我解压到G盘,然后直接运行 G:\apache-jmeter-4.0\bin\jmeter.bat 即可。
二、设置语言。
Options --> choose language -->chinese(Simplified)
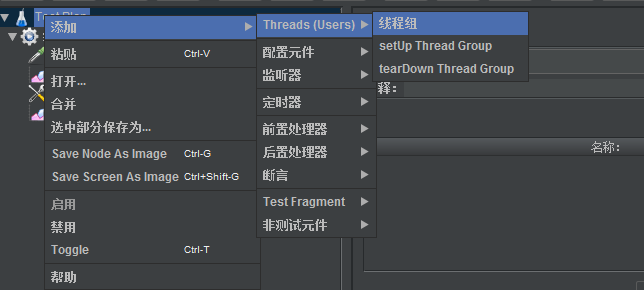
三、添加线程组。(添加模拟用户)
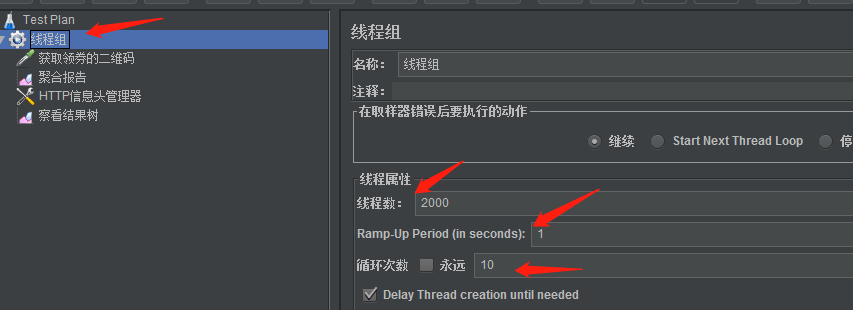
- 线程数:模拟的用户数,这里我模拟2000个用户。
- Ramp-Up Period(in seconds):代表隔多长时间执行,0代表同时并发。设置线程数需要多长时间全部启动。如果线程数为2000 ,准备时长为1 ,那么需要1秒钟启动2000个线程。
- 循环次数:每个线程发送请求的次数。如果线程数为2000 ,循环次数为10 ,那么每个线程发送10次请求。总请求数为2000*10=20000 。如果勾选了“永远”,那么所有线程会一直发送请求,直到点击上面的“停止”按钮。
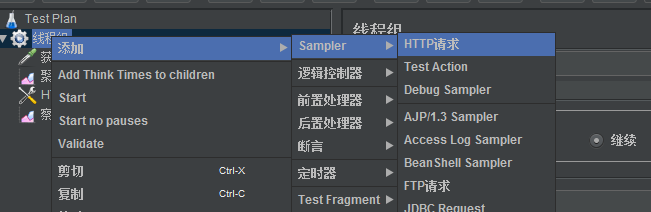
四、添加HTTP请求。
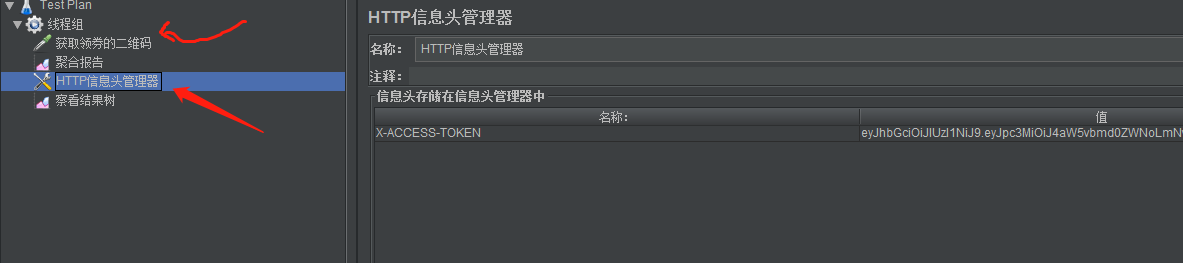
五、如果有专门的HTTP请求头。可以添加http请求头。
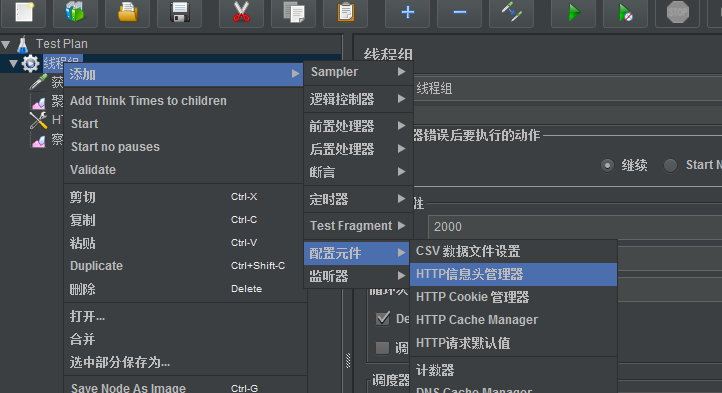
如下:添加之后对所有当前线程的请求起作用。发送请求的时候会带上这个请求头。
六、添加聚合报告。
聚合报告用来查看 tps 等指标。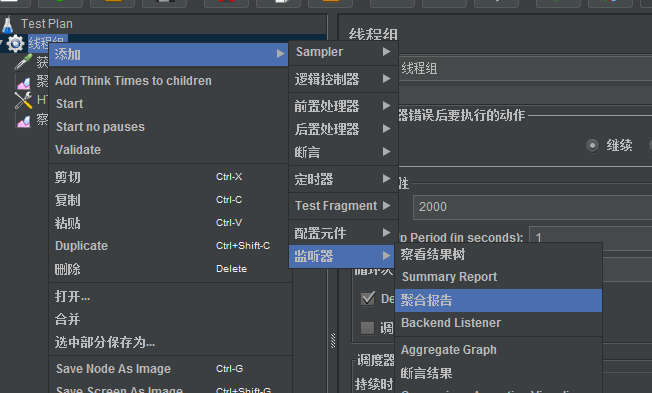
七、添加“查看结果树”
“查看结果树” 用来查看HTTP请求返回的结果。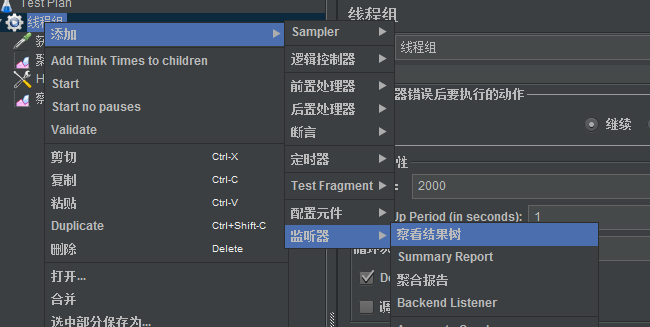
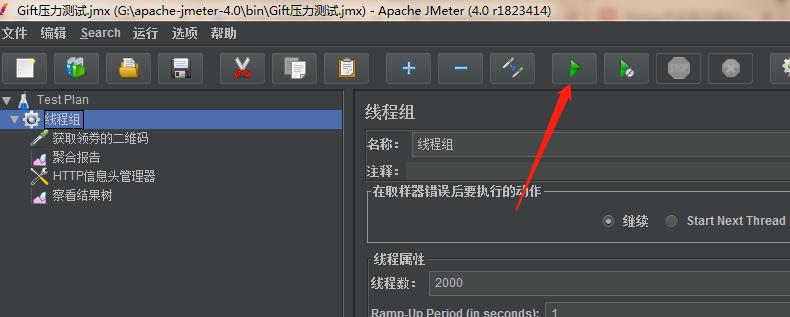
八、运行测试。
九、停止测试,清除测试结果。
在进行下一次测试之前,要把上一次的测试结果清除掉。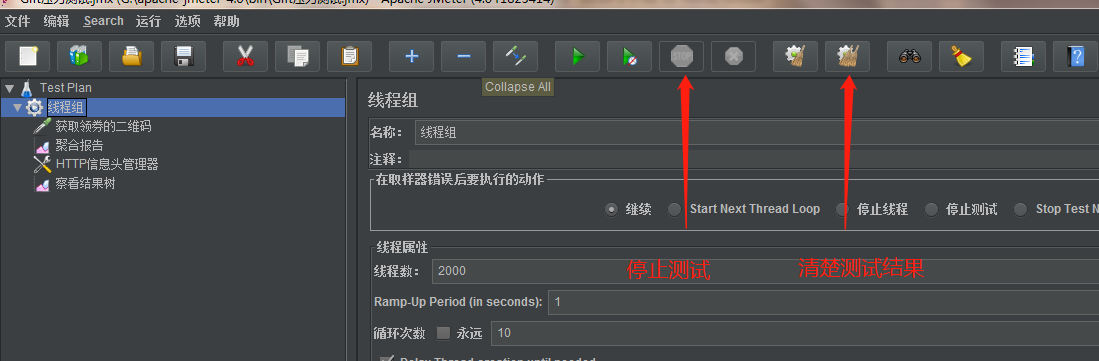

















 3509
3509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









