



系统安装
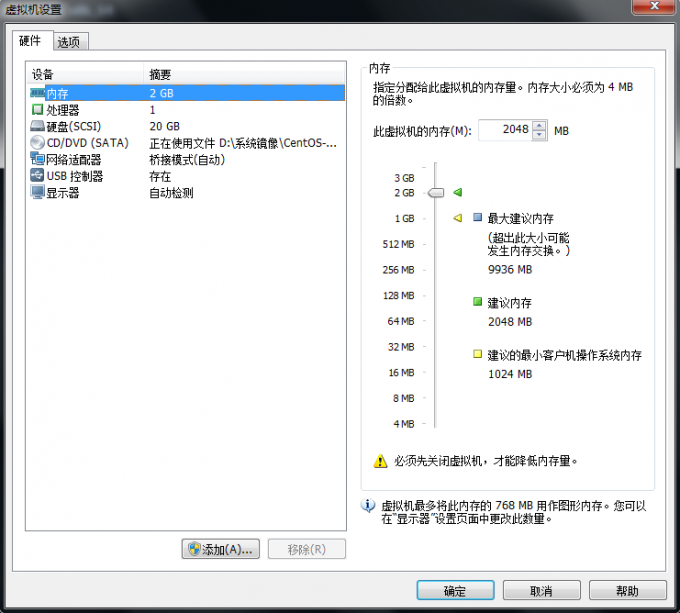
- 创建VMWARE虚拟机
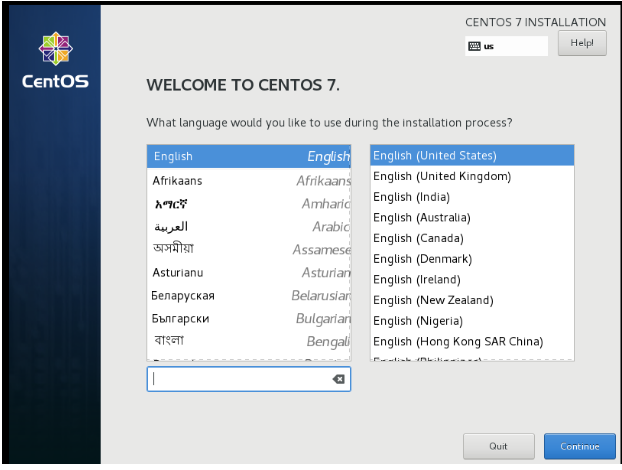
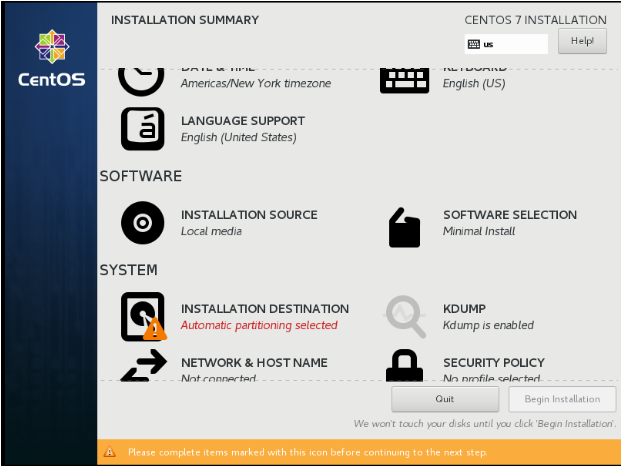
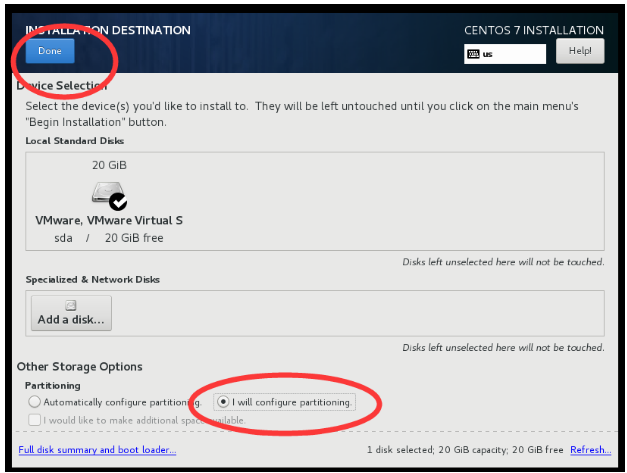
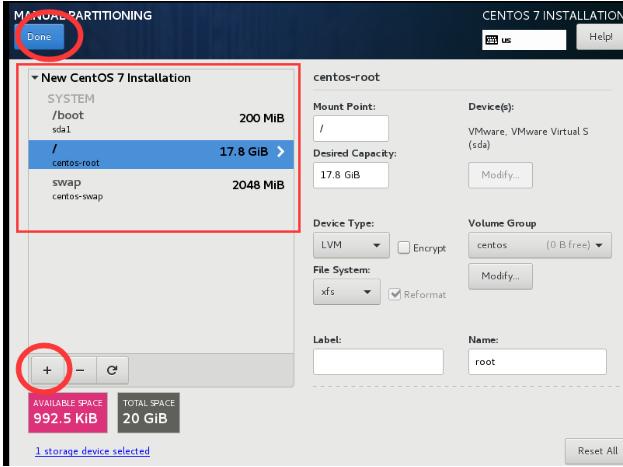
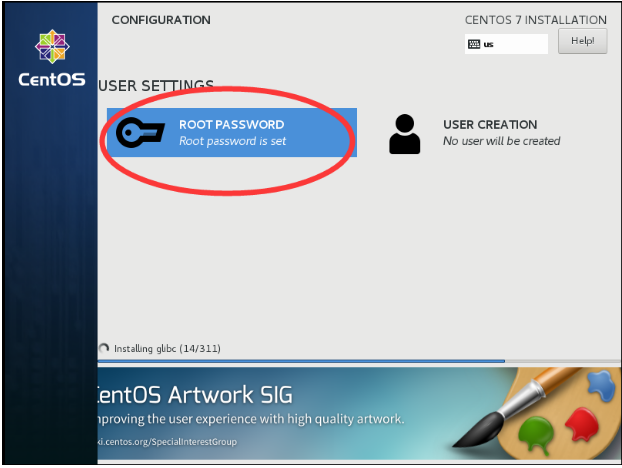
- 安装系统
- 配置ip地址
[root@localhost ~]# vi /etc/sysconfig/network-scripts/ifcfg-ens33
TYPE=Ethernet
PROXY_METHOD=none
BROWSER_ONLY=no
BOOTPROTO=static
DEFROUTE=yes
IPV4_FAILURE_FATAL=no
IPV6INIT=yes
IPV6_AUTOCONF=yes
IPV6_DEFROUTE=yes
IPV6_FAILURE_FATAL=no
IPV6_ADDR_GEN_MODE=stable-privacy
NAME=ens33
UUID=258089a3-eaa5-4812-83c9-e93367947685
DEVICE=ens33
ONBOOT=yes
IPADDR=192.168.199.200
NETMASK=255.255.255.0
GATEWAY=192.168.199.1
DNS=61.153.177.196
我配置的是桥接到物理网卡的模式,因为可以直接在路由器上做nat,通过端口映射可以使用外网直接访问!
密钥登录
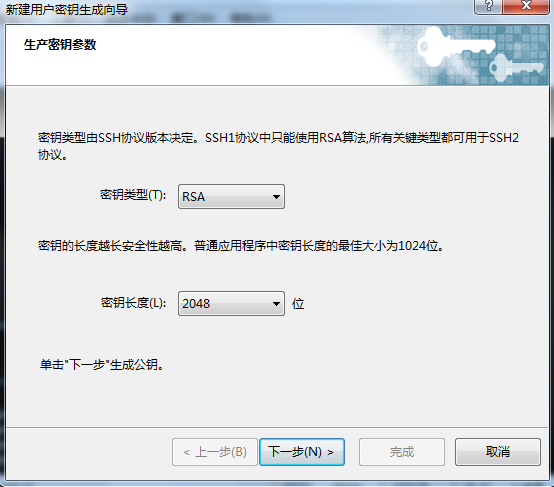
- 使用xshell先生成公钥
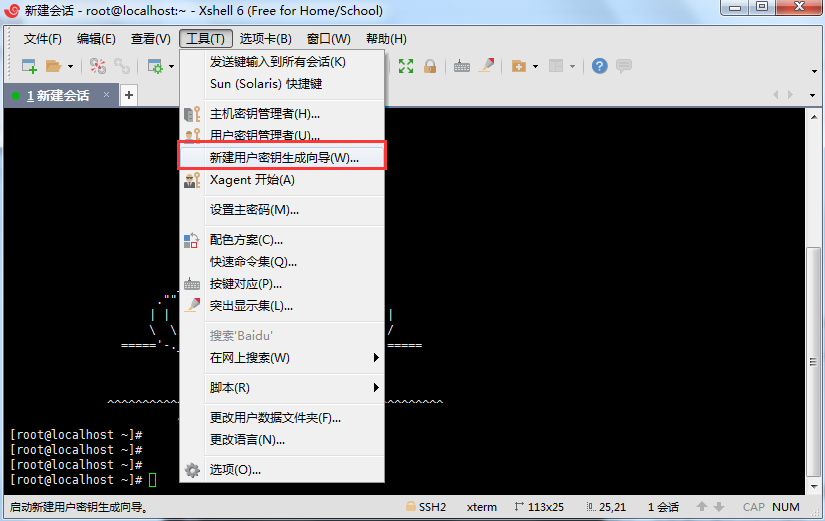
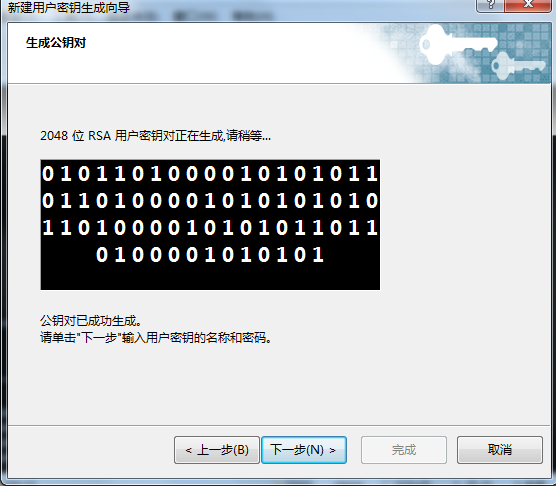

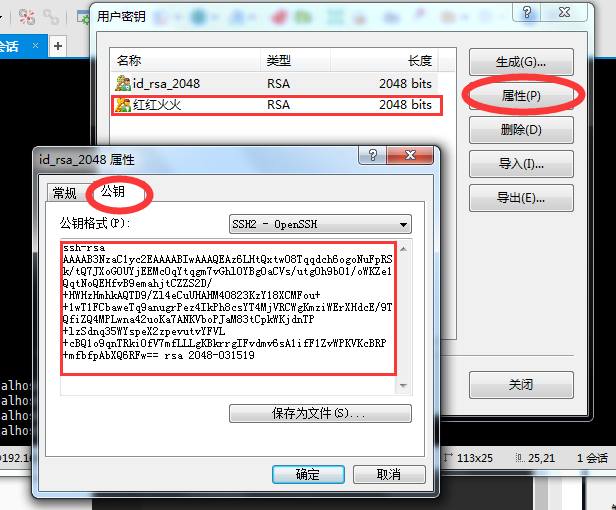
复制公钥。
- 创建公钥保存文件
[root@localhost ~]# mkdir /root/.ssh
[root@localhost ~]# chmod 700 .ssh
[root@localhost ~]# vi /root/.ssh/authorized_keys //把先前复制的公钥粘贴在里面
[root@localhost ~]# setenforce 0
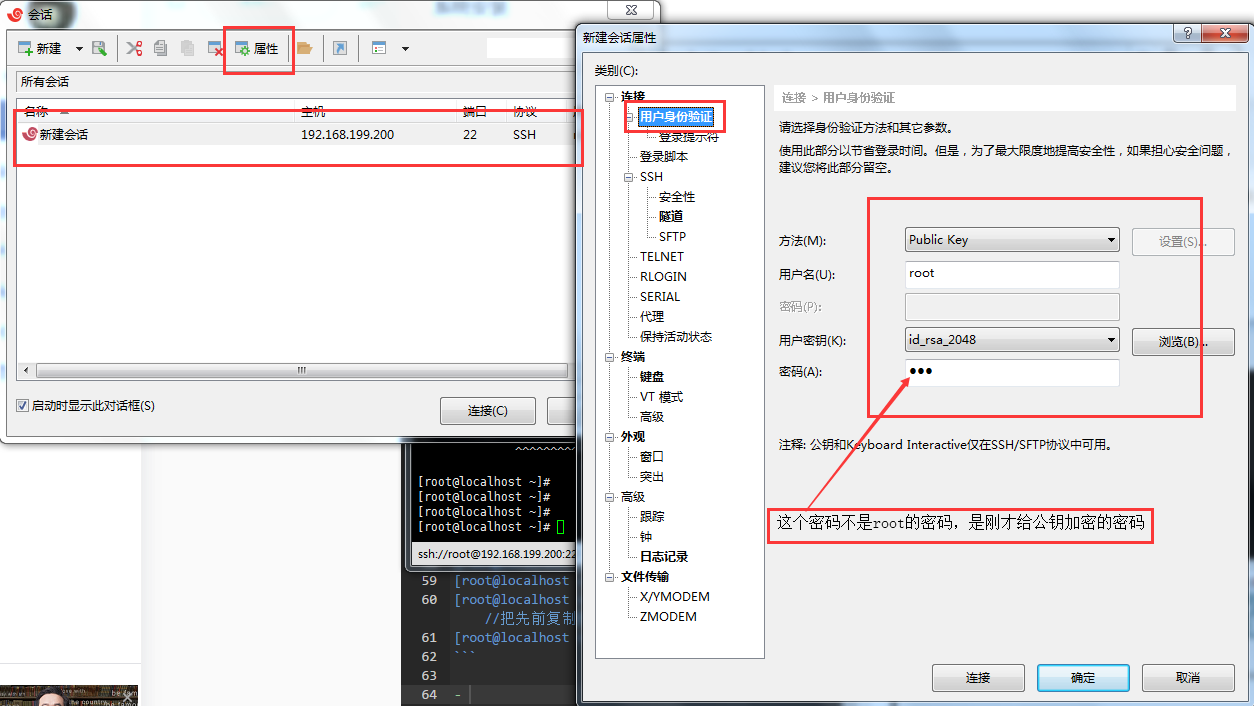
- 使用密钥登录系统
单用户模式
重启系统,按照操作 press 'e' 进入grub,修改关键字符。然后ctrl+x 重启


救援模式步骤: 单用户模式的前提是grub未被加密,反之就得使用救援模式了,步骤:
- 将mirror放入CD/DVD中
- 鼠标右击虚拟机标签电源
- 启动时进入bios
- 进入bios后修改boot的启动项为 CD ROM Drive 保存
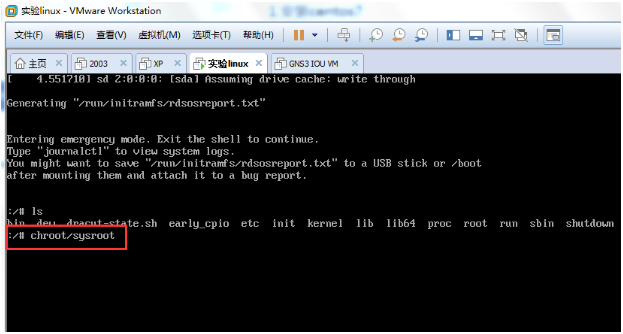
- choose troubleshooting ----> recure a centos linux system---->choose 1) continue press enter to get a shell
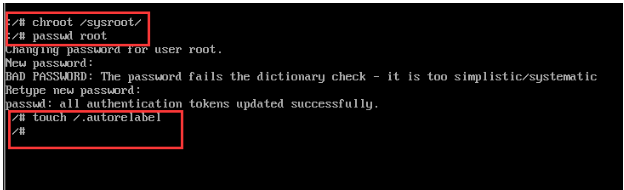
- chroot /mnt/sysimage
- passwd root
- touch /.autorelabel 重启(小心bios改回来)!!!
系统之间互相登录

tty为本地登录 pts为远程登录
[root@localhost ~]# ssh root@192.168.199.201
root@192.168.199.201's password:
Last login: Fri Mar 15 06:18:11 2019 from 192.168.199.218
_oo0oo_
088888880
88" . "88
(| -_- |)
0\ = /0
___/'---'\___
.' \\\\| |// '.
/ \\\\||| : |||//\\
/_ ||||| -:- |||||- \\
| | \\\\\\ - /// | |
| \_| ''\---/'' |_/ |
\ .-\__ '-' __/-. /
___'. .' /--.--\ '. .'___
."" '< '.___\_<|>_/___.' >' "".
| | : '- \'.;'\ _ /';.'/ - ' : | |
\ \ '_. \_ __\ /__ _/ .-' / /
====='-.____'.___ \_____/___.-'____.-'=====
'=---='
^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
佛祖保佑 iii 永不死机
[root@localhost ~]# w
06:20:20 up 16 min, 2 users, load average: 0.00, 0.01, 0.05
USER TTY FROM LOGIN@ IDLE JCPU PCPU WHAT
root pts/0 192.168.199.218 06:18 2:09 0.00s 0.00s -bash
root pts/1 192.168.199.200 06:20 3.00s 0.00s 0.00s w
笔记
==操作系统的核心是内核,所谓内核个人理解为tcp/ip协议的最底层协议,他直接关联硬件为所有上层应用提供服务。为了满足日益增长的各种需求,所以内核需要不断升级!==
[root@localhost ~]# uname -a
Linux localhost.localdomain 3.10.0-693.el7.x86_64 #1 SMP Tue Aug 22 21:09:27 UTC 2017 x86_64 x86_64 x86_64 GNU/Linux
[root@localhost ~]# cat /etc/centos-release
CentOS Linux release 7.4.1708 (Core)
通过命令可以查看该主机内核为 3.10.0-693.el7.x86_64 系统版本为 CentOS Linux release 7.4.1708 (Core)
修改系统banner
[root@localhost ~]# vi /etc/motd

















 4748
4748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









