




 本文介绍了如何使用树莓派通过GPIO接口控制SG90舵机,搭建舵机云台。重点讲解了SG90舵机的连接方式,BCM与BOARD模式的区别,以及PWM脉宽调制在控制舵机角度中的作用。通过Python的RPI.GPIO模块,实现了舵机从0度到180度的连续旋转,并提供了相关代码示例。
本文介绍了如何使用树莓派通过GPIO接口控制SG90舵机,搭建舵机云台。重点讲解了SG90舵机的连接方式,BCM与BOARD模式的区别,以及PWM脉宽调制在控制舵机角度中的作用。通过Python的RPI.GPIO模块,实现了舵机从0度到180度的连续旋转,并提供了相关代码示例。
参考博客:
https://blog.youkuaiyun.com/wangzhenyang2/article/details/80426361树莓派笔记13:舵机云台(一)
https://blog.youkuaiyun.com/oalevel/article/details/79211215 树莓派GPIO针脚在的BCM与BOARD模式
https://blog.youkuaiyun.com/crazyquhezheng/article/details/42650469树莓派控制SG90舵机
https://blog.youkuaiyun.com/wailaizhu/article/details/54666520 使用python 控制G90舵机,RPI.GPIO 模块的脉宽调制(PWM)功能
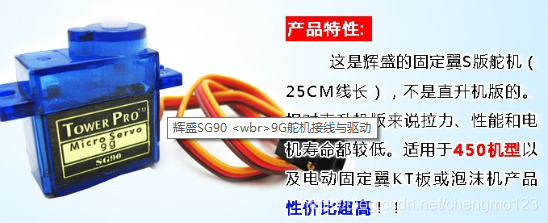
SG90一共三根线,红线接5V电源,棕线GND。黄线为数据控制线,该线接到GPIO上,这里我们是BCM模式的pin 21.(注意树莓派针脚的BCM和BOARD区别)
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 865
865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









