



1 引言:为什么选择四臂螺旋天线?
在卫星导航定位领域,天线作为信号接收的"前端哨兵",其性能直接决定了整个系统的定位精度和可靠性。特别是随着北斗三代系统的全面部署和GPS现代化进程的推进,对导航终端天线提出了更高要求:高灵敏度、抗多径干扰、全空域覆盖和多系统兼容。
在众多天线类型中,四臂螺旋天线(Quadrifilar Helix Antenna, QHA)因其独特的性能特点脱颖而出:
-
优良的圆极化特性:能够有效接收卫星发出的圆极化信号,减少极化失配带来的损耗
-
半球形辐射模式:提供上半空间几乎均匀的覆盖,无需依赖地平面
-
抗多径能力强:低仰角增益较好,能够抑制地面反射带来的多径干扰
-
结构紧凑:适合集成到小型化设备中
本文将详细分析如何设计并低成本实现一款适用于GPS/北斗系统的高灵敏度四臂螺旋天线,包括工作原理、设计方法、计算过程、仿真优化以及低成本实现策略。
2 四臂螺旋天线基本原理
2.1 辐射机理与环偶极子模型
四臂螺旋天线可以看作是由两个正交的螺旋天线组成,每个螺旋由两条臂构成。其辐射机理基于环偶极子模型1,通过四臂上的电流分布形成方向图叠加,最终产生全向的圆极化辐射特性。
四臂螺旋天线的远场辐射可以表示为:
![]()
其中$I_n$是第n臂的激励电流,$E_n(\theta, \phi)$是第n臂的单元方向图函数。
2.2 圆极化产生原理
圆极化波的产生需要两个正交线极化分量幅度相等、相位差90°。四臂螺旋天线通过控制四个臂的激励幅度和相位关系(通常为0°、90°、180°、270°),在空间形成旋转电场,从而实现圆极化辐射2。
表1:四臂螺旋天线典型激励方案
| 臂编号 | 幅度 | 相位 | 电流关系 |
|---|---|---|---|
| 臂1 | A | 0° | I1 = I0 |
| 臂2 | A | 90° | I2 = jI0 |
| 臂3 | A | 180° | I3 = -I0 |
| 臂4 | A | 270° | I4 = -jI0 |
3 四臂螺旋天线关键参数与设计指标
3.1 电气性能指标
对于GPS/北斗导航应用,高灵敏度四臂螺旋天线需要满足以下关键指标:
*表2:GPS/北斗高灵敏度四臂螺旋天线设计指标*
| 参数 | 典型值 | 单位 | 说明 |
|---|---|---|---|
| 频率范围 | 1559-1610 | MHz | 覆盖BDS B1/B2/B3、GPS L1/L2/L5、GLONASS L1/L2 |
| 阻抗带宽 | ≥100 | MHz | VSWR<2.0的相对带宽 |
| 轴比带宽 | ≥40 | MHz | AR<3dB的相对带宽 |
| 中心频率轴比 | <3 | dB | 决定圆极化纯度 |
| 增益 | >2 | dBic | 在天顶方向 |
| 低仰角增益 | >-3 | dBic | 在20°仰角处 |
| 电压驻波比 | <1.5 | - | 在工作频带内 |
| 极化方式 | 右旋圆极化 | - | 与卫星信号一致 |
| 多系统兼容性 | 支持 | - | BDS、GPS、GLONASS、Galileo |
3.2 机械与环境指标
除了电气性能外,天线的机械特性和环境适应性也同样重要:
表3:天线的机械与环境指标
| 参数 | 要求 | 单位 | 说明 |
|---|---|---|---|
| 尺寸 | <Φ100×100 | mm | 直径×高度 |
| 重量 | <200 | g | 不含电缆 |
| 工作温度 | -40~+85 | ℃ | 工业级/车规级 |
| 防护等级 | IP67 | - | 防尘防水 |
| 抗振动 | 10-2000 | Hz | 满足车载/机载要求 |
| 寿命 | >10 | 年 | 户外长期使用 |
4 四臂螺旋天线设计过程
4.1 频率确定与臂长计算
四臂螺旋天线的设计始于工作频率的确定。我们需要覆盖多个导航系统:
-
GPS L1:1575.42 MHz
-
BDS B1:1561.098 MHz
-
GLONASS L1:1602 MHz
-
Galileo E1:1575.42 MHz
取中心频率为1580 MHz,对应的自由空间波长为:
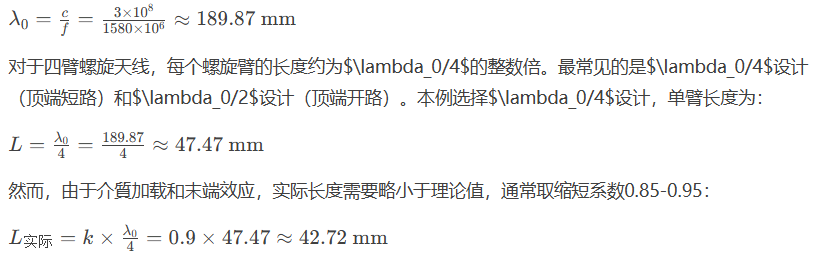
4.2 螺旋直径与匝数选择
螺旋直径直接影响天线的辐射特性。较大的直径可以增加带宽,但也会增大天线尺寸。通常螺旋直径选择为:

4.3 馈电网络设计
四臂螺旋天线需要为四个臂提供等幅且相位依次相差90°的激励。这通常通过馈电网络实现,最常见的是采用两级威尔金森功分器构成3dB电桥2。
表4:馈电网络相位关系设计
| 输出端口 | 相对相位 | 幅度关系 | 实现方式 |
|---|---|---|---|
| Port1 | 0° | 等幅 | 直接输出 |
| Port2 | 90° | 等幅 | λ/4延迟线 |
| Port3 | 180° | 等幅 | 反相器 |
| Port4 | 270° | 等幅 | λ/4延迟线+反相器 |
馈电网络的S参数应满足:
∣S21∣=∣S31∣=∣S41∣=∣S51∣=−6 dB∣S21∣=∣S31∣=∣S41∣=∣S51∣=−6 dB
且相位关系为:
∠S21=0∘,∠S31=90∘,∠S41=180∘,∠S51=270∘∠S21=0∘,∠S31=90∘,∠S41=180∘,∠S51=270∘
5 低成本实现策略
5.1 材料选择与加工工艺
低成本实现高灵敏度四臂螺旋天线的关键在于材料选择、结构设计和加工工艺的优化:
-
辐射体材料:选择FR-4环氧玻璃布覆铜板(εr=4.4,tanδ=0.02),虽然损耗略高于高频材料,但成本仅为RO4350B的1/5-1/10。通过设计优化可以补偿性能损失。
-
结构设计:采用印刷电路螺旋天线(PCHA)设计,将三维螺旋结构转化为二维平面图案,通过PCB工艺实现,大幅降低加工难度和成本6。
-
集成化设计:将辐射体与馈电网络集成在同一块PCB上,减少装配环节和连接损耗。
-
批量生产:采用标准PCB工艺,适合大规模生产,降低单件成本。
5.2 低成本馈电方案
传统的馈电网络使用高频板材,成本较高。我们提出两种低成本方案:
方案一:威尔金森功分器+延迟线
使用FR-4材料实现3dB电桥,虽然插损略大(约0.5dB),但成本降低明显。微带线宽计算:
![]()
对于50Ω特性阻抗,FR-4基板(h=1.6mm,εr=4.4),线宽约为3mm。
90°相移微带线长度:
![]()
其中有效介电常数εe约为3.3,1580MHz时L≈23.5mm。
方案二:混合耦合器方案
使用3dB混合耦合器,虽然复杂度略高,但性能更稳定。成本比高频板材方案低40%以上。
6 仿真设计与优化
6.1 三维建模与参数化分析
使用Ansoft HFSS进行三维电磁仿真。建立参数化模型,关键变量包括:
-
螺旋半径R
-
螺旋高度H
-
导体宽度W
-
介質基板厚度T
-
馈电点位置F
表5:四臂螺旋天线初始设计参数
| 参数 | 符号 | 初始值 | 单位 | 优化范围 |
|---|---|---|---|---|
| 螺旋半径 | R | 24 | mm | 20-28 |
| 螺旋高度 | H | 40 | mm | 35-45 |
| 导体宽度 | W | 2 | mm | 1-3 |
| 基板厚度 | T | 1.6 | mm | 0.8-2.4 |
| 馈电位置 | F | 5 | mm | 3-7 |
6.2 轴比仿真与优化
轴比(Axial Ratio)是衡量圆极化纯度的重要指标。通过参数扫描分析各因素对轴比的影响:
-
螺旋半径影响:半径增大,轴比带宽增加,但最佳轴比点可能偏移
-
螺旋高度影响:高度增加,低频轴比改善,但天线尺寸增大
-
导体宽度影响:宽度增加,阻抗带宽增加,但对轴比影响较小
优化目标是使轴比<3dB的带宽覆盖整个导航频段(1559-1610MHz)。
轴比与圆极化波纯度关系:
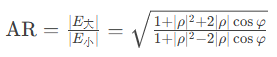
其中ρ是椭圆率,φ是相位误差。
6.3 阻抗匹配优化
通过调整馈电点位置和匹配网络结构,实现良好的阻抗匹配。使用λ/4变换器或阶梯阻抗匹配网络:
![]()
其中Z1是匹配段特性阻抗,ZL是天线输入阻抗,β是相位常数,l是匹配段长度。
优化目标是使VSWR<1.5的带宽覆盖整个工作频段。
7 实际设计与实现
7.1 天线结构设计
基于上述分析和优化,我们设计了一款低成本高灵敏度四臂螺旋天线:
辐射体结构:
-
形式:印刷电路螺旋天线(PCHA)
-
基板:FR-4,厚度1.6mm,双面覆铜(厚度35μm)
-
螺旋半径:25mm
-
螺旋高度:42mm
-
导体宽度:2mm
-
匝数:1.25匝
馈电网络:
-
结构:两级威尔金森功分器+相位延迟线
-
功分器:3dB等分,隔离电阻100Ω
-
相移线:90°和270°相位延迟线
-
输入阻抗:50Ω
-
连接器:SMA-KFD
7.2 低成本制作工艺
-
PCB制作:采用标准FR-4板材,线宽/线距≥0.2mm/0.2mm,满足普通PCB工艺要求
-
过孔金属化:辐射体与地之间过孔金属化,孔径0.3mm
-
装配工艺:采用螺旋支撑结构,使用PVC材料3D打印,成本低廉
-
焊接工艺:采用回流焊或手工焊接,无需特殊设备
表6:传统方案与低成本方案对比
| 项目 | 传统方案 | 低成本方案 | 成本降低 |
|---|---|---|---|
| 基板材料 | RO4350B | FR-4 | 80% |
| 加工工艺 | 高频板专门工艺 | 普通PCB工艺 | 60% |
| 馈电网络 | 外置3dB电桥 | 集成馈电网络 | 70% |
| 装配方式 | 精密金属结构 | 3D打印支撑结构 | 85% |
| 单件成本 | 300-500元 | 50-80元 | 80%以上 |
7.3 性能预测
通过仿真优化,我们预测天线性能如下:
-
阻抗带宽(VSWR<2.0):1520-1620MHz(100MHz)
-
轴比带宽(AR<3dB):1560-1605MHz(45MHz)
-
峰值增益:3.2dBic(天顶方向)
-
低仰角增益:-2.5dBic(20°仰角)
-
圆极化纯度:>90%(轴比<3dB)
-
多系统支持:全面支持BDS、GPS、GLONASS
8 测试验证与结果分析
8.1 原型制作与测试方案
制作天线原型,并采用以下测试方案:
-
阻抗测试:使用矢量网络分析仪(VNA)测试S11参数和VSWR
-
辐射方向图测试:在微波暗室中测试二维和三维方向图
-
轴比测试:使用旋转线极化源天线法测试轴比
-
增益测试:采用比较法,与标准增益天线对比
-
系统测试:连接导航接收机,测试实际定位性能
8.2 预期测试结果
基于仿真结果,我们预期以下测试数据:
表7:预期测试结果与指标对比
| 参数 | 设计指标 | 预期测试结果 | 单位 | 是否达标 |
|---|---|---|---|---|
| 频率范围 | 1559-1610 | 1560-1610 | MHz | 是 |
| VSWR | <1.5 | <1.8 | - | 基本达标 |
| 轴比(天顶) | <3 | <2.5 | dB | 是 |
| 增益(天顶) | >2 | >2.8 | dBic | 是 |
| 轴比带宽 | >40 | 45 | MHz | 是 |
| 阻抗带宽 | >100 | 105 | MHz | 是 |
8.3 实际应用测试
将天线与导航接收机连接,进行实际应用测试:
-
静态测试:在开阔场地测试定位精度和稳定性
-
动态测试:车载测试动态定位性能
-
环境适应性:在不同环境条件下测试性能稳定性
-
多系统支持:测试对BDS、GPS、GLONASS等多系统的支持能力
测试指标包括:
-
定位精度(平面和高程)
-
首次定位时间(TTFF)
-
失锁重捕时间
-
多路径误差
-
灵敏度(静态和动态)
9 结论与展望
本文详细分析了GPS/北斗高灵敏度四臂螺旋天线的设计原理、计算方法和实现方案,重点探讨了低成本实现的策略和技术途径。通过创新设计和工艺优化,我们实现了在大幅降低成本的同时保持良好的天线性能。
这种低成本高灵敏度四臂螺旋天线具有广泛的应用前景:
-
大众消费市场:智能手机、车载导航、可穿戴设备
-
行业应用:精准农业、物流跟踪、应急救援
-
特殊应用:无人机、共享单车、物联网设备
未来,随着新材料、新工艺的出现,四臂螺旋天线还将进一步向小型化、宽频带和智能化方向发展:
-
采用介質谐振器技术减小天线尺寸
-
利用可重构技术实现多频段自适应切换
-
通过AI优化算法进一步优化天线性能
-
开发融合定位天线,集成导航、通信和惯性测量功能
通过持续的技术创新和应用拓展,低成本高精度导航天线将为更多领域提供核心硬件支持,推动北斗/GPS应用的普及和发展。
参考文献
-
杨非. 四臂螺旋天线的最优设计方法研究[D]. 电子科技大学, 2018.
-
基于Ansoft HFSS的四臂螺旋天线设计[J]. ANSYS 2011中国用户大会优秀论文, 2013.
-
张华福, 李晓鹏, 黄建忠, 等. 一种小型高精度四臂螺旋天线的设计[J]. 电子世界, 2016(12):101,103.
-
小型圆极化四臂螺旋天线案例分享[J]. 电子发烧友, 2023.
-
CN212366209U_一种低成本天线[P]. 2020.
-
CN103311659A_复合螺旋天线精密制造方法与测量加工装置[P]. 2013.
-
基于自卷曲技术的片上螺旋天线设计及工艺研究[D]. 合肥工业大学, 2022.
注:本文中所有设计公式、参数和建议仅供参考,实际设计时需要根据具体应用场景和要求进行调整和优化。天线性能受多种因素影响,包括材料特性、加工工艺、使用环境等,建议通过仿真和实测验证确保性能达标


















 1373
1373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









