




论文标题:A COST-EFFECTIVE, STAND-ALONE, AND REAL-TIME TINYML-BASED GAIT DIAGNOSIS UNIT AIMED AT LOWER-LIMB ROBOTIC PROSTHESES AND EXOSKELETONS 中文标题:面向下肢机器人假肢和外骨骼的经济型、独立式、实时TinyML基础步态诊断单元
作者信息:
- Zarin Anjum Madhiha,布拉库大学电气与电子工程系,达卡1212,孟加拉国,zarin.anjum.madhiha@g.bracu.ac.bd
- Antar Mazumder,拉杰沙希工程技术大学机电工程系,拉杰沙希6204,孟加拉国,antar.mte@ieee.org
- Sohani Munteha Hiam,拉杰沙希工程技术大学电气与电子工程系,拉杰沙希6204,孟加拉国,sohani@eee.ruet.ac.bd
论文出处:arXiv:2411.08474v1 [cs.RO],2024年11月13日发布
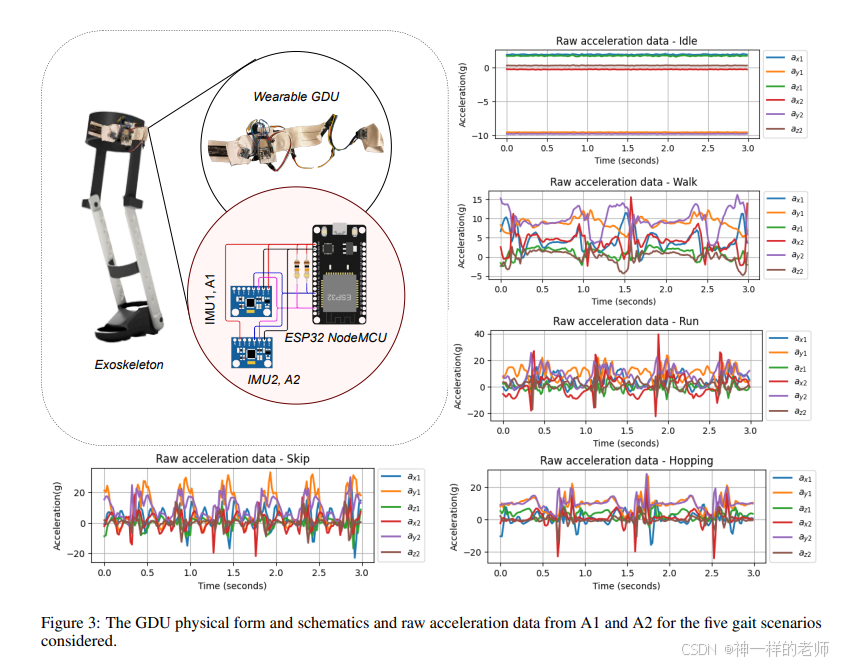
摘要: 在成本不断上升的世界中,只有十分之一的患者能够获得普通医疗假肢,而先进的机器人假肢和外骨骼由于高昂的成本而难以普及。本研究的目标是提出一个经济实惠、可穿戴的实时步态诊断单元(GDU),旨在服务于机器人假肢和外骨骼。作为概念验证,研究还开发了GDU原型,该原型利用TinyML在ESP32 NodeMCU开发板上运行两个并行的量化int8模型,有效分类五种步态场景(静止、行走、跑步、单脚跳、双脚跳)并基于两个附加IMU接收的加速度数据生成异常得分。开发的可穿戴步态诊断独立单元可以安装在任何假肢或外骨骼上,并能有效地以92%的总体准确率分类步态场景,并在实时提供异常得分,仅需3秒的步态数据,且在95-96毫秒内完成。
关键词:康复机器人、机器人假肢、经济型机器人假肢、机器人外骨骼、人类步态分类、TinyML、嵌入式AI
-
引言: 介绍了从出生缺陷到意外事故导致人类失去四肢的问题,以及如何通过各种类型的假肢来克服这些限制。机器人假肢和外骨骼利用现代电机械组件和智能控制系统提供更准确的步态。然而,尽管机器人假肢和外骨骼相比传统假肢具有巨大潜力,但由于成本和复杂性,它们的普及受到了限制。
-
相关工作: 回顾了步态分类的研究工作,主要通过摆动相分析进行,使用加速度计数据进行经济有效的步态检测。提到了使用LSTM等方法处理IMU收集的时序数据。还讨论了DCNN、BPNN和GCN等其他方法,并指出了现有方法的局限性,如缺乏实时实施和成本较高。
-
方法论: 研究的方法论分为四个阶段:1)开发步态诊断单元(GDU),2)数据收集和处理,3)训练修改后的CNN+K-means模型,4)在实时步态诊断中部署。详细介绍了GDU的开发、数据收集和预处理、模型架构和实时步态诊断的部署。
-
结果: 分析了模型性能(精确度、召回率、准确率、F1分数和平均异常分数)、成本与性能权衡,以及数据采集和推理延迟。模型在大多数类别上表现出近乎完美的性能,总体准确率为92%。K-means基于异常分数在不同年龄组间有所变化,青年组的平均异常分数较高。
-
讨论: 提出了一种识别常见步态场景的方法,而不是像大多数当代研究那样基于步态事件的严格分析。讨论了模型的一些局限性,如分类准确性略低,以及K-means基于异常分数的算法阈值确定的缺失。尽管存在这些缺点,但由于其出色的模块化、低训练数据需求和为个体患者快速定制GDU的可行性,该方法的好处远远超过了局限性。
-
结论: 可负担性是需要先进假肢或外骨骼系统的患者的主要关注点。本研究提出并开发了一种基于TinyML的可穿戴GDU,能够以92%的总体准确率进行步态场景分类,并基于仅两个IMU和一个经济的ESP32 NodeMCU开发板生成步态异常得分,展现了在成本大幅降低的情况下的潜在解决方案。作者坚信,尽管存在一些轻微的局限性,这是使机器人假肢和外骨骼对更多有需要的人更加可用的正确步骤。未来计划提高分类准确性,并在更小的数据收集窗口上运行推理。还计划利用NodeMCU的IoT特性,将外骨骼模型无缝集成到数字孪生中。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











