




 场景测试是一种使用故事进行的软件测试活动,强调复杂性和真实性。它不同于单一步骤的测试用例,涵盖多个步骤。场景测试有助于理解产品、关联测试与需求,暴露缺陷,并促进需求讨论。确定主流程和可选流程是创建场景的关键,同时测试用例设计需与场景相结合。测试用例和场景各有优缺点,选择取决于产品特性和测试条件。
场景测试是一种使用故事进行的软件测试活动,强调复杂性和真实性。它不同于单一步骤的测试用例,涵盖多个步骤。场景测试有助于理解产品、关联测试与需求,暴露缺陷,并促进需求讨论。确定主流程和可选流程是创建场景的关键,同时测试用例设计需与场景相结合。测试用例和场景各有优缺点,选择取决于产品特性和测试条件。
场景测试属于一种非常常见的测试方法。那到底什么是场景测试呢?
下面的内容,是基于场景测试的定义、特点、使用场景,编写方法、与测试用例的区别,来进行详细的阐述。
定义:
- 场景测试是一种使用场景来进行的软件测试活动,一般使用假设的Story来帮助测试人员解决复杂的问题,或者是用于测试系统。
- 理想的场景测试是一个可信的、复杂的、有创意的故事,其结果很容易评估。
- 这些测试通常不同于测试用例,因为测试用例是单个步骤,而场景涵盖了许多步骤。
特点 (一个好的测试场景都有什么特点呢)
- 该测试是基于一个如何使用程序的Story,包含有关参与者的动机。
- 这个Story很关键。有影响力的参与者会推动修复未能通过测试的程序。
- 这个Story可信。它不仅会发生在现实世界中;利益相关者也会相信这样的事情将会发生。
- Story涉及对程序的复杂使用、在复杂的环境中的使用,以及在复杂的数据集里使用。
- 测试结果易于评价。这对于所有测试都很有价值,但对于场景尤其重要,因为它们很复杂。
使用场景(为什么使用场景测试)
- 学习产品
- 将测试与文档化的需求联系起来
- 暴露缺陷,以交付期望的产品
- 探索程序的专家级使用
- 让bug报告更积极
- 将与需求相关的问题暴露出来,这可能涉及重新开启旧的需求讨论(使用新数据)或显示尚未确定的需求。
如何做场景测试
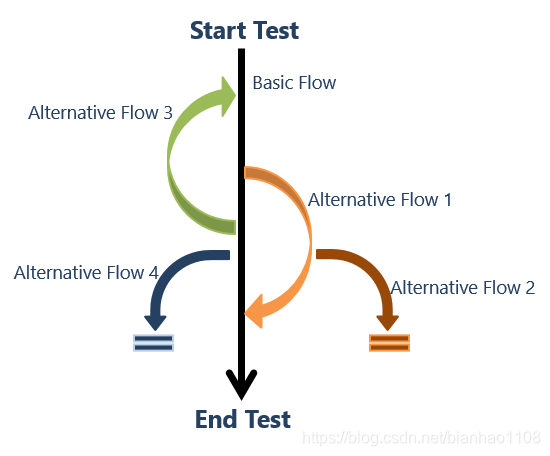
- 确定主流程和可选流程
- 在场景测试中,基于正确的操作流来实现正确的结果。我们把这个流程称为主流程
- 当在操作流中遇到失败流程时,我们将此流称为可选流
场景测试的方法
- 列出主流程和可选流程
- 基于主流程和可选流程创建不同的场景
- 基于每个场景设计测试用例
- 评审测试用例
测试用例和测试场景的区别
测试用例 | 测试场景 |
| 测试用例由测试用例名称、前置条件、步骤/输入条件、预期结果组成。 | 测试场景由一个详细的测试过程组成。一个测试场景有许多与之相关的测试用例 |
| 测试用例是低级动作,它可以从测试场景中派生出来 | 测试场景是测试需求的高级分类 |
| 测试用例意味着在测试时,有详细的文档可以指导测试。 | 测试场景意味着详细地讨论和思考需求。 |
| 详细的测试用例文档,可以充分保护新软件测试人员。 | 降低产品的复杂性和可重复性的测试场景,就是测试用例。 |
| 详细的测试用例,它需要更多的时间和资源 | 在新的软件的测试中,它是一种新的思路,并且节省时间。 |
| 适合初级测试人员 | 适合高级测试人员 |
在实际应用场景中,我们应该结合当前产品的特点,例如产品特性,测试规模,人力资源,时间范围,可得资源等等因素,综合考虑,选择适合当前产品的用例编写方法。
通过以上的学习,我们可以看到,测试用例和测试场景是相辅相成的。它们既可以独立存在,也可以融合使用。它们既有各自的优势,也有各自的弊端。

















 1777
1777

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









