



随着全球导航卫星系统(GNSS)的快速发展与智能手机的广泛普及,用户对智能手机定位服务的依赖度和精度需求日益提升。智能手机高精度定位在行人导航、车辆车道级导航、应急救援等诸多领域具有重要应用价值,未来有望在大众市场设备中实现高精度应用的规模化推广。
自2016年之后的 Android 操作系统开放原始 GNSS 测量数据提取功能以来,智能手机高精度定位技术也逐渐成为了可能。科研人员围绕单频精密单点定位、双频定位、实时动态定位等方向开展了大量研究,且已验证利用相位观测值进行高精度定位的可行性。然而,智能手机 GNSS 观测面临诸多挑战:因为成本有限导致观测数据噪声大、多路径效应显著,在城市环境中还存在频繁的信号遮挡和严重的非视距(NLOS)信号干扰,数据质量不佳的问题严重影响定位性能,成为制约智能手机高精度定位发展的核心瓶颈。针对上述背景,武汉大学-百度北斗协同高精定位实验室多位科研人进行了研究与实验,发现数据质量控制是实现智能手机高精度定位的关键,进而找到了随机模型研究作为数据质量控制的重要突破口,通过为观测值分配合理权重,应用于百度地图和百度定位SDK中,为亿万用户和百万开发者显著改善了定位精度。我们同步撰写了《Improving smartphone precise positioning based on a new weighting method》一文发表于2025年的GPS Solutions,以下是论文的相关要点:
PART 1 提出 velocity-assisted 加权方法
针对现有高程相关加权法和 SNR 加权法的局限性,创新性地提出了一种基于精密速度估计的新型加权方法。该方法突破了传统加权方法依赖高程角或 SNR 的思路,将速度估计残差作为加权指标,结合 SNR 加权法构建了全新的加权策略,实现了对观测数据质量的更精准评估和权重分配。PART 2 融合双速度估计方法优势整合了多普勒速度估计与时间差分载波相位(TDCP)速度估计两种方法的优势。多普勒速度估计无需相位观测值,但在高动态环境下精度较低且易产生异常值;TDCP 速度估计需依赖相位观测值,精度可达厘米级甚至毫米级,但易受周跳影响,在复杂环境下精度下降明显。通过将两种方法结合,并引入异常值检测和运动学约束策略,有效提升了速度估计的可靠性和精度,为新型加权方法提供了高质量的速度数据支撑。PART 3 构建多维度权重融合机制提出将速度估计残差推导的权重与 SNR 权重相乘的融合机制。速度估计残差能够精准反映伪距观测误差,而 SNR 可捕捉到速度估计残差未能检测到的部分精度变化,二者的融合实现了优势互补,显著增强了权重与实际观测精度的相关性,为提升定位性能奠定了基础。
PART 1 速度估计技术
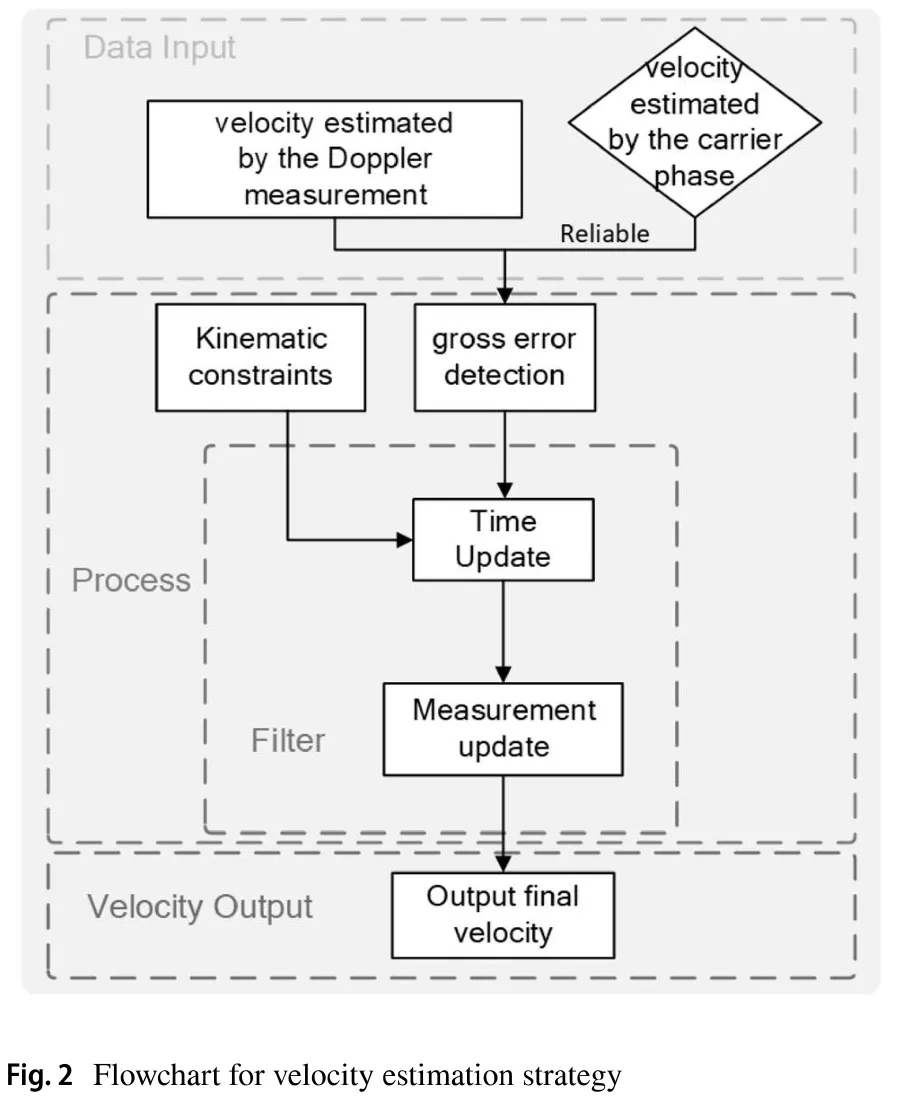
1.多普勒速度估计
基于 GNSS 多普勒观测方程,考虑卫星和接收机钟频偏差影响,通过平方根信息滤波(SRIF)求解智能手机速度。该方法无需相位观测数据,计算复杂度较低,适用于多种观测场景。

2.TDCP 速度估计
采用载波相位观测值的时间单差方法,在假设无周跳的前提下,通过连续两个历元的载波相位差分构建观测方程。当采样率较高时,忽略电离层延迟和对流层延迟变化,利用精密星历计算卫星钟差,结合 SRIF 实现速度估计,精度可达高水平。

3.速度估计优化策略
针对车载场景设计了异常值检测机制,通过计算垂直方向速度变化与加速度的偏差判断异常值,并采用选择较小垂直方向速度的修正策略;同时在速度估计过程中施加运动学约束,对垂直方向施加更严格的约束(速度变化较小),进一步提升速度估计精度。
PART 2 权重确定技术
1.传统加权方法模型高程相关加权法采用 σₑₗₑ²=σ₀²/sin²(ele) 模型,其中 σ₀² 为常数方差,ele 为卫星高程角;SNR 加权法采用
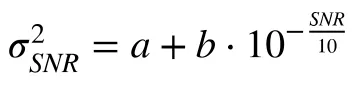
其中 a 和 b 为模型系数,需根据不同星座和频率拟合确定。
2.新型加权方法模型首先通过速度估计结果计算历元间伪距残差 δ_P,该残差主要由伪距观测误差引起,能够反映伪距观测质量;然后基于伪距残差构建速度辅助权重 ω_VEL,当 |δ_P|≥η₁时,ω_VEL=Con/(δ_P)²,当 |δ_P|<η₁时,ω_VEL=Con/(η₁)²(Con 为常数,基于经验分析和拟合确定);最后将速度辅助权重与 SNR 权重融合,得到最终权重 ω=ω_VEL/σ_SNR²,实现对观测值的合理加权。
PART 3 数据处理与定位解算技术
1.数据预处理采用 1Hz 采样间隔,设置 7° 截止角,涵盖 GPS、GLONASS、BDS、Galileo 等多卫星星座;通过武汉大学全球电离层图(GIM)修正电离层延迟,采用全球气压温度 2(GPT2)模型修正对流层延迟,利用武汉大学提供的差分码偏差(DCB)产品进行偏差修正。
2.定位解算采用平方根信息滤波(SRIF)作为估计器,将接收机钟差和接收机位置作为白噪声进行估计,结合构建的加权模型实现单点定位(SPP)解算,输出智能手机的定位结果。
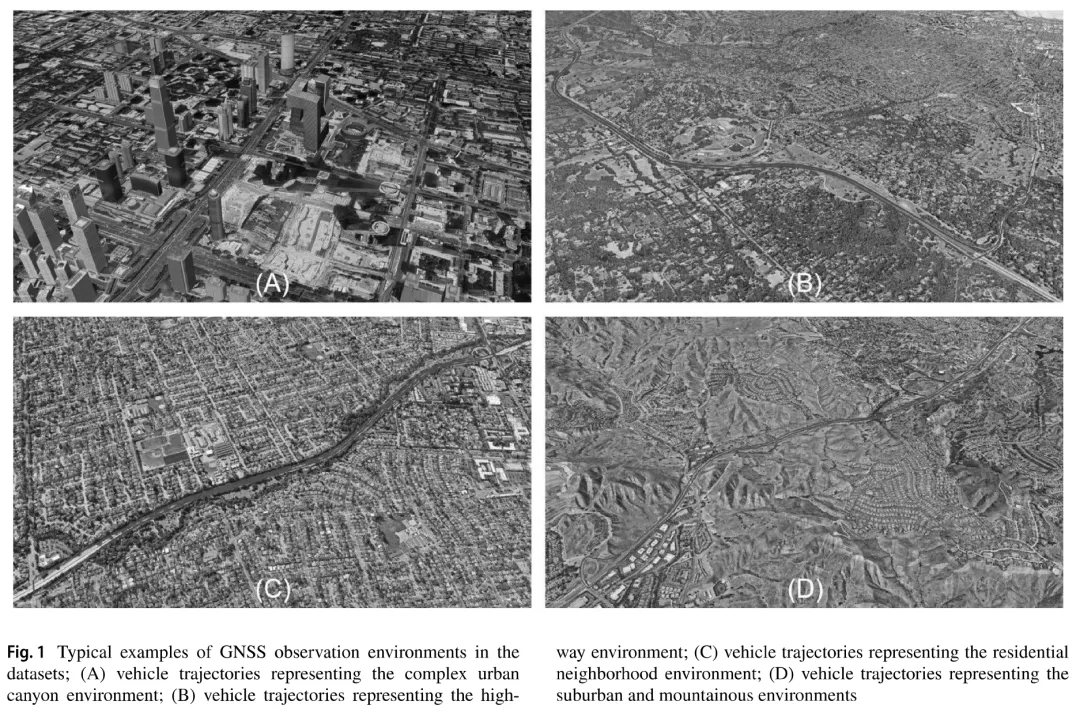
PART 1 测试数据概况
实验采用了 168 组智能手机数据,分为两部分:一是在北京朝阳国际贸易中心和中关村公园周边 urban 区域收集的 3 天车载智能手机数据,涉及 Vivo、Honor、Huawei 等品牌机型,采样率 1Hz,称为北京数据集;二是 2022 年谷歌智能手机分米级挑战赛(GSDC)数据集的 158 组数据,涵盖 Google Pixel 4、Google Pixel 4 XL、Google Pixel 5、Samsung Galaxy S20 Ultra、Xiaomi 8 等机型,数据时间跨度为 2020 年 5 月 15 日至 2021 年 12 月 28 日,称为谷歌数据集。参考坐标方面,北京数据集通过高精度设备后处理获取,谷歌数据集采用公开的 GSDC 竞赛厘米级精度参考坐标。测试场景包括四种典型环境:复杂城市峡谷环境(高楼密集,定位难度大)、高速公路环境(路边无建筑物,设备快速移动)、居民区环境(道路附近多低层房屋)、郊区山地环境(从郊区向山地过渡,左侧有多个山峰)。
PART 2 速度估计精度测试结果
1.北京数据集
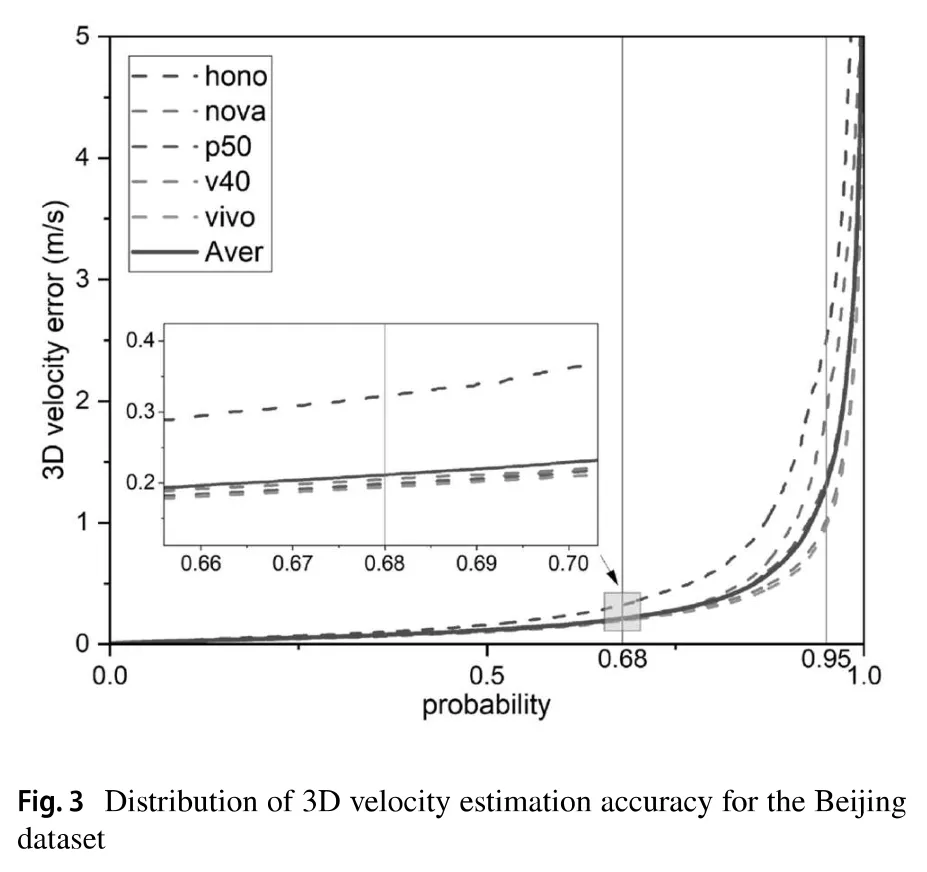
3D 速度估计误差的 95% 分位数为 1.51m/s,均方根(RMS)为 0.38m/s;68% 分位数下,几乎所有智能手机型号的速度估计精度优于 0.2m/s,95% 分位数下多数机型优于 1.3m/s。其中 Vivo 和 Honor V40 因具备相位观测值,性能优于其他机型;Honor 仅支持单频信号,精度相对较低。
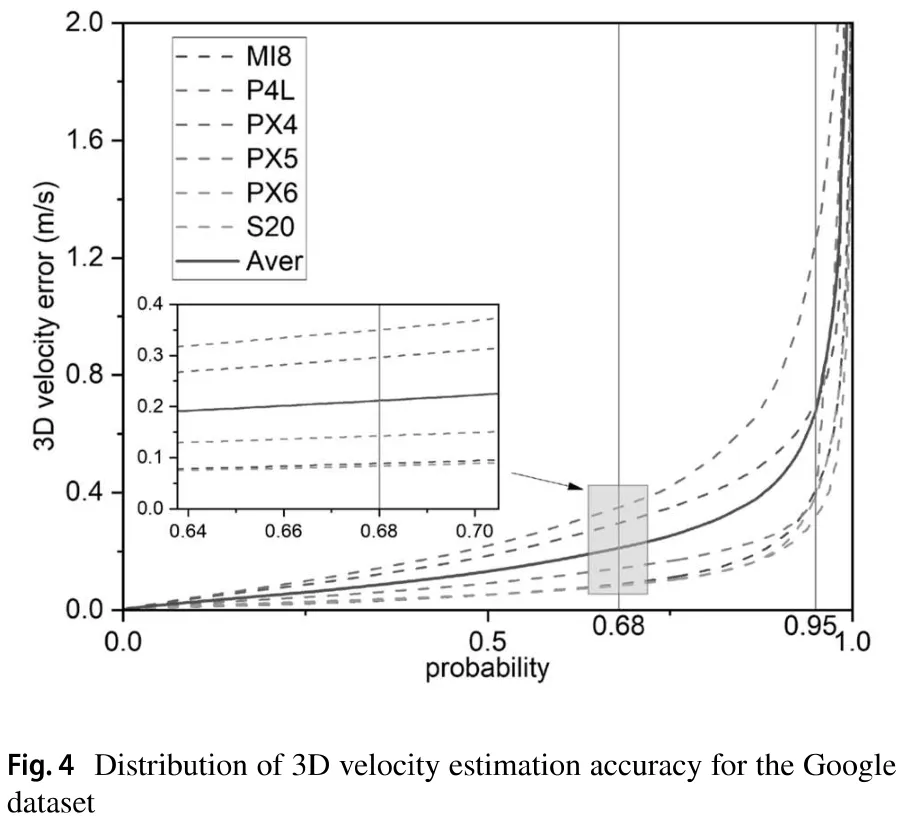
2.谷歌数据集环境更开阔,3D 速度估计误差的 95% 分位数为 0.73m/s,RMS 为 0.27m/s;68% 分位数下,Samsung Galaxy S20 Ultra 和 Xiaomi 8 精度优于 0.1m/s,所有机型平均精度为 0.2m/s;95% 分位数下多数机型精度约为 0.3m/s。Google Pixel 4 XL 虽支持双频但多数历元依赖单频观测,Google Pixel 4 相位观测数据严重中断,导致二者精度相对较低,但通过设置 η₁=0.5(经验值),其速度误差对加权计算影响较小。

3.总体结论
智能手机 GNSS 速度估计精度显著高于伪距观测精度,距离误差(采样间隔 1s)在复杂环境下仍处于较低水平,为新型加权方法提供了可靠的数据支撑。
PART 3 相关性分析结果
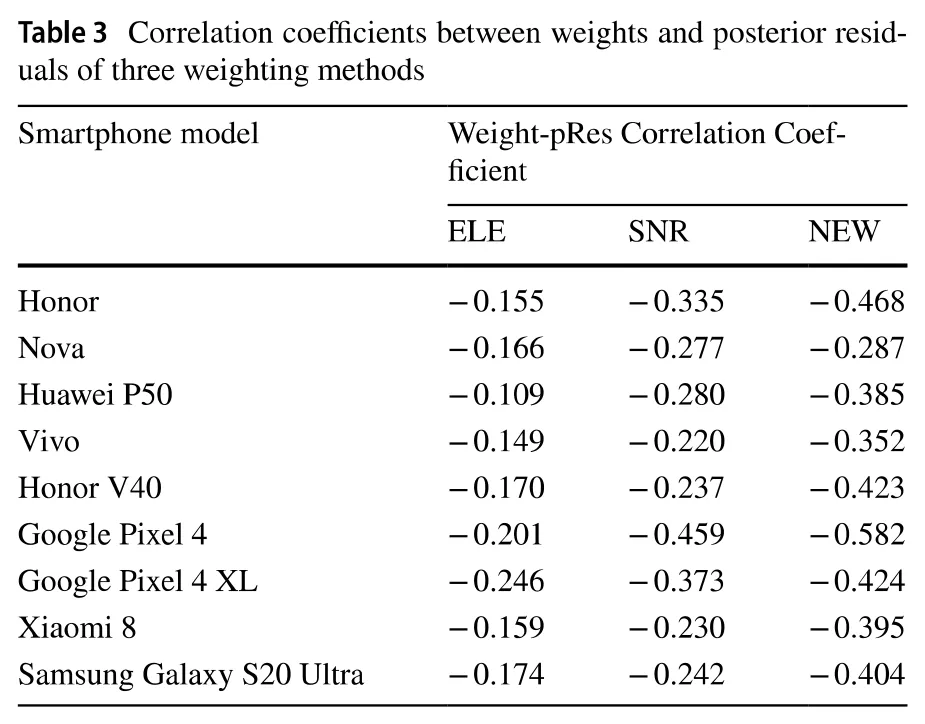
采用斯皮尔曼(Spearman)方法分析三种加权方法的权重与后验残差(pRes)的相关性,结果显示:
新型加权方法(NEW)的权重与后验残差的平均相关系数为 - 0.413,显著高于高程相关加权法(ELE,-0.170)和 SNR 加权法(SNR,-0.295)。具体机型方面,Honor 机型的 NEW 方法相关系数为 - 0.468,Google Pixel 4 达到 - 0.582,均明显优于同机型的 ELE 和 SNR 方法。速度估计残差(Vel-Res)与后验残差呈正相关,验证了基于 Vel-Res 构建权重的合理性;同时 SNR 可捕捉 Vel-Res 未检测到的部分精度变化,二者融合进一步增强了相关性。PART 4 实际定位精度测试结果
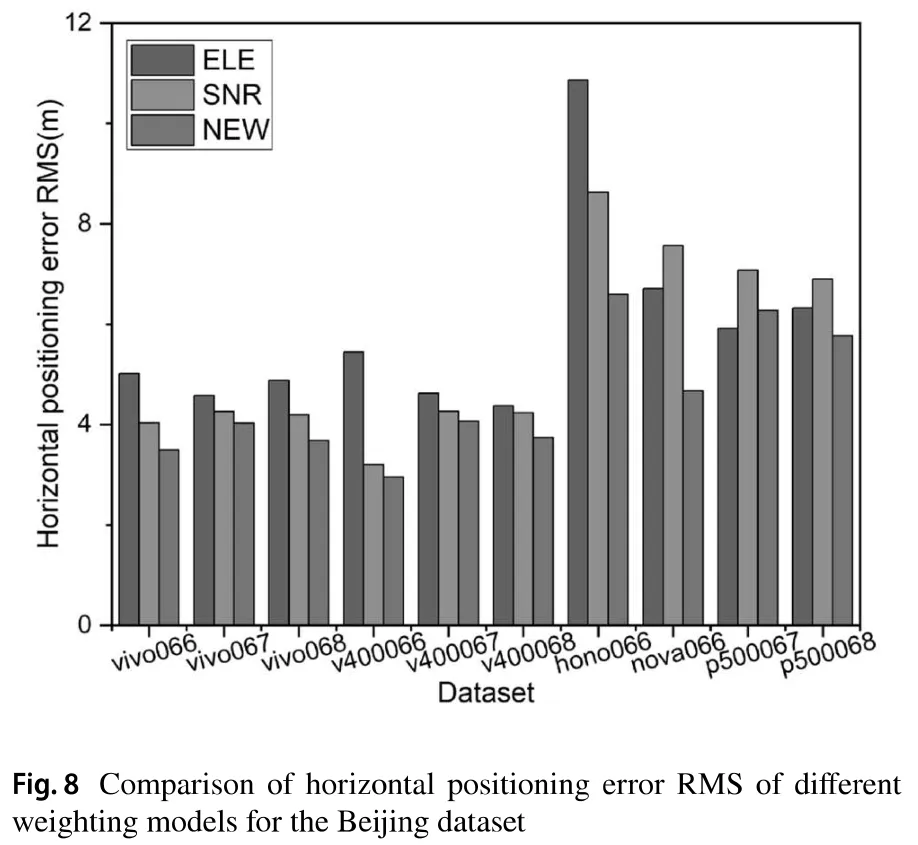
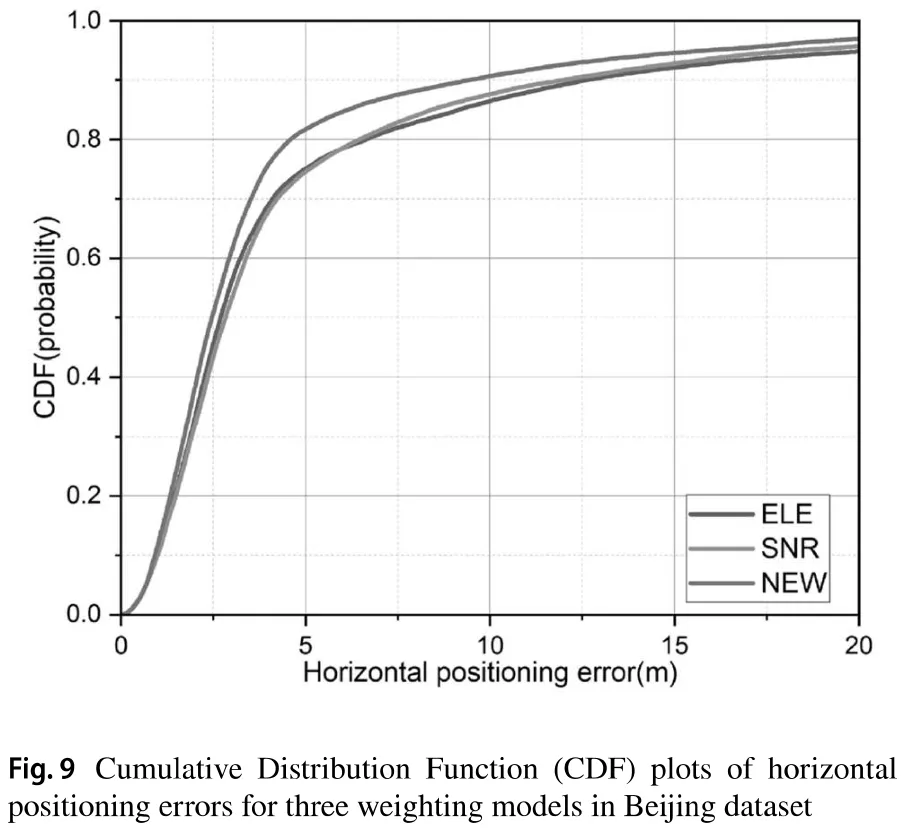
1.北京数据集(复杂环境)RMS 指标:NEW 方法的水平定位误差 RMS 为 4.40m,较 ELE 方法(5.87m)减少 1.47m,精度提升 25.04%;较 SNR 方法(5.44m)减少 1.04m,精度提升 19.12%。分位数指标:95% 置信水平下,NEW 方法的水平定位误差为 13.67m,较 ELE 方法(20.24m)减少 6.57m,提升 32.46%;较 SNR 方法(19.02m)减少 5.35m,提升 28.12%;68% 分位数下,NEW 方法误差为 3.21m,优于 ELE 方法(4.24m)和 SNR 方法(4.41m)。累积分布函数(CDF):CDF=0.68 时,NEW 方法定位误差 3.38m,ELE 方法 3.89m,SNR 方法 4.00m;误差阈值 5m 时,NEW 方法 CDF 为 0.82,ELE 和 SNR 方法均为 0.75,表明 NEW 方法在相同概率下误差更小。误差序列:在 300-500、1700-1900、2800-3000 等 epochs 的复杂环境中,NEW 方法显著降低了东西和南北方向的定位误差,即使对于无相位观测数据、无法进行 TDCP 速度估计的机型,仍能有效减少定位误差。
2.谷歌数据集(环境较开阔)RMS 指标:NEW 方法的水平定位误差 RMS 为 1.63m,较 ELE 方法(1.70m)提升 4.12%,较 SNR 方法(1.68m)提升 2.98%,提升幅度虽小于北京数据集,但仍保持优势。分位数指标:95% 置信水平下,NEW 方法水平定位误差为 2.95m,ELE 方法 3.23m,SNR 方法 3.11m;68% 分位数下,NEW 方法 1.81m,略优于两种传统方法。特殊场景:对于无相位观测数据的 Google Pixel 4 XL,NEW 方法在 500-700 epochs 有效降低误差波动;对于有相位观测数据的 Xiaomi 8,在周跳发生时和无周跳时段(1200-1500、1900-2100 epochs)均保持较小误差。地图验证:在直线行驶、转弯、房屋遮挡或树木遮挡等不同环境下,NEW 方法的定位结果均更接近真实位置,表现出稳定的定位性能。
3.方法普适性:NEW 方法在不同品牌、不同配置的智能手机(单频 / 双频、有无相位观测值)中均能保持优势,而 SNR 方法因系数适配性问题,在部分机型中表现甚至不如 ELE 方法,进一步凸显了 NEW 方法的普适性。
本文的新型加权方法通过融合速度估计残差与 SNR 权重,显著提升了权重与实际观测精度的相关性,远超传统的高程相关加权法和 SNR 加权法,为定位精度提升奠定了核心基础。其速度估计精度表现优异,且通过异常值检测和运动学约束策略,进一步保证了速度数据的可靠性,充分支撑了伪距观测值的加权需求。现有传统加权方法存在明显局限性,高程相关加权法不适用于智能手机,SNR 加权法缺乏通用性,而新型加权方法无需针对不同智能手机型号单独拟合复杂系数,通过引入截断参数 η₁,有效降低了速度误差对权重计算的影响,适用于不同品牌、不同配置(单频 / 双频、有无相位观测值)的智能手机,且在复杂城市峡谷、高速公路、居民区、郊区山地等多种环境中均能稳定发挥作用,鲁棒性显著优于传统方法,为智能手机高精度定位提供了一种更高效、可靠的加权方案。也为智能手机高精度定位技术的实用化和规模化推广提供了重要的技术支撑,具有广阔的应用前景和研究价值。
百度地图以北斗优先为核心,深耕高精度定位技术,将自主可控的北斗时空能力与论文提出的新型速度辅助加权方法深度融合,铸就车道级、车位级、隧道级导航等硬核实力。从成都东站东站的室内外无缝导航到全国超300城的车道级服务,技术创新始终扎根国之重器。同时在行业赋能方面,百度地图以赋能千行百业 LBS 开发者、普惠智能汽车导航市场为使命,以精准定位链接万物,用智能生态激活创新,在数字中国与智能汽车产业爆发的浪潮中,让北斗的中国精度与 AI 的智能高度并肩,让位置服务成为驱动各行各业高质量发展、智能出行体验升级的核心引擎。

















 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









