最近在换代码布局,因为发现代码布局也可以引起一个人的兴趣
这个方法是算法Edmonds-Karp 最短增广路算法,不知道的话可以百度一下,基于Ford-Fulkerson算法的基础上延伸的
其实我不是很透彻的领悟这个算法的精髓,只知道怎样实现,现在的任务就是多刷几道题,见识见识题型,就可以更透彻领悟为什么这么做,之后再拐回来研究算法,这样就可以学习和实践相结合!
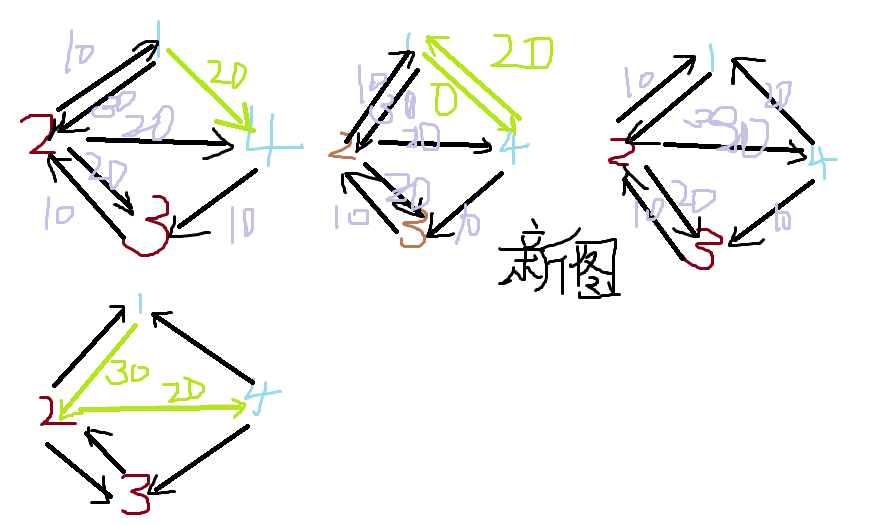
详解 : 就是每次广搜后都让走过的边减去这条通路的最小的通路,逆向通路加上这条通路的最小通路,也就是最大容纳量,形成新的通路
之后就记录最小通路 maxflow=0 ;maxflow+=minflow;
1 2 3 4 连接矩阵初始化
1 0 40 0 20
2 0 0 30 20
3 0 0 0 10
4 0 0 0 0
#include<iostream>
#include<stdio.h>
#include<string.h>
#include<queue>
using namespace std;
#define Min(a, b) a<b?a:b;
#define INF 0x3f3f3f3f
const int N=220;
int river, land;
int G[N][N], pre[N];//previous 先前的
int EK(int s, int e);//start, end
bool BFS(int s, int e);
int main()
{
while(scanf("%d%d", &river, &land)!=EOF)
{
memset(G, 0, sizeof(G));
int a, b, flow;
while(river--)
{
scanf("%d%d%d", &a, &b, &flow);
G[a][b]+=flow;//调试的时候发现少了一个‘+’,因为可能有重边
}
int ans = EK(1, land);
printf("%d\n", ans);
}
return 0;
}
int EK(int s, int e)
{
int maxflow=0;//就是要求的最大流
while(BFS(s, e)==true)//注意这里是while 因为要进行BFS直到整个图都被搜完了,无法再搜了;
{
int minflow=INF;//这是定义了最小流,根据木桶原理,其实就是这个通道最大容纳量
for(int i=e; i!=s; i=pre[i])//这里for循环里面的东西, i从e开始每次都变为它的前一个节点,
minflow=Min(minflow, G[pre[i]][i]);
for(int i=e; i!=s; i=pre[i])//修改路径
{
G[pre[i]][i]-=minflow;
G[i][pre[i]]+=minflow;
}
maxflow+=minflow;
}
return maxflow;
}
bool BFS(int s, int e)
{
memset(pre, 0, sizeof(pre));
queue<int>Q;
Q.push(s);
while(!Q.empty())
{
int i=Q.front(); Q.pop();//队首出队列
if(i==e)
return true;
for(int j=1; j<=e; j++)//调试的时候发现少些一个‘=’ j<=e;
{
if(G[i][j]&&pre[j]==0)//当i和j点之间有通路时,且没有被访问过
{
pre[j]=i;
Q.push(j);
}
}
}
return false;
}




 本文深入探讨Edmonds-Karp最短增广路算法,基于Ford-Fulkerson算法的延伸,详细讲解通过广搜更新边权重,实现最大流计算的过程。代码示例使用C++实现,包括初始化连接矩阵,进行BFS搜索,更新最小通路等关键步骤。
本文深入探讨Edmonds-Karp最短增广路算法,基于Ford-Fulkerson算法的延伸,详细讲解通过广搜更新边权重,实现最大流计算的过程。代码示例使用C++实现,包括初始化连接矩阵,进行BFS搜索,更新最小通路等关键步骤。