



 本文介绍如何在Liferay中通过修改liferay-display.xml文件来隐藏不需要的Portlet,并将特定Portlet移至工具分类,实现门户页面的个性化定制。
本文介绍如何在Liferay中通过修改liferay-display.xml文件来隐藏不需要的Portlet,并将特定Portlet移至工具分类,实现门户页面的个性化定制。
经过2、3两步后,剩余Portlet已经不多,添加Application页面如下:
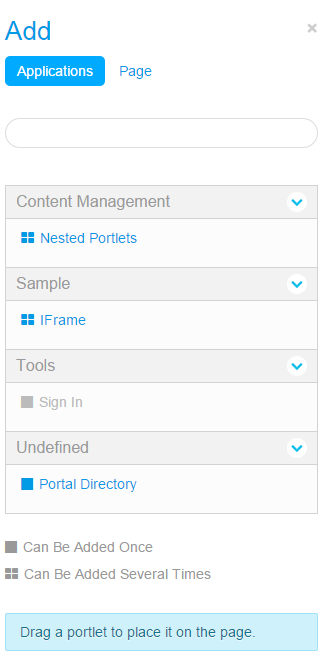
将用不到的Portlet隐藏起来:11 Portal目录 (Portal Directory)
将内嵌Protlet和IFrame Portlet移到工具分类中。
修改/portal-master/portal-web/docroot/WEB-INF/liferay-display.xml文件:
<display>
<category name="category.hidden">
<portlet id="2" />
<portlet id="9" />
<portlet id="11" />
<portlet id="58" />
<portlet id="125" />
<portlet id="127" />
<portlet id="128" />
<portlet id="129" />
<portlet id="130" />
<portlet id="132" />
<portlet id="134" />
<portlet id="135" />
<portlet id="137" />
<portlet id="139" />
<portlet id="146" />
<portlet id="149" />
<portlet id="174" />
<portlet id="185" />
</category>
<category name="category.tools">
<portlet id="48" />
<portlet id="118" />
</category>
</display>
修改后如下:


















 1422
1422

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









