



 本文介绍如何在Spring Boot项目中配置application.yml文件,设置活动配置文件为test环境并指定端口号为81。同时,指导创建视图文件夹templates及html文件,实现通过@RequestMapping注解访问视图。
本文介绍如何在Spring Boot项目中配置application.yml文件,设置活动配置文件为test环境并指定端口号为81。同时,指导创建视图文件夹templates及html文件,实现通过@RequestMapping注解访问视图。
建立一个src/main/resource文件夹,在还文件夹下面添加一个application.yml的配置文件,
`spring:
profiles:
active: test
spring:
profiles: test
server:
port: 81`
active表示使用test的端口,port表示端口号为81
建立一个src/main/view并在其下面建立一个templates文件夹,在该文件夹下建立一个html文件,
可以在其他文件里面直接访问。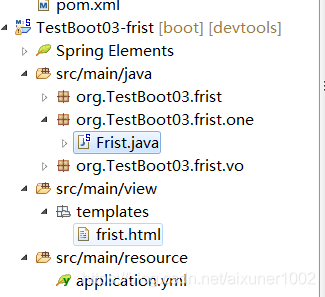
访问方式如下:在这里插入代码片`
@RequestMapping(value = “/add”)
public String addname() {
return “frist”;
}

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









