




 本文介绍了 API 相关知识及 API 文档编写。先解释 API 是虚拟插口,遵循协议集成功能。接着说明通过 API 文档使用 API,阐述文档应包含基本信息、请求响应格式等元素。最后推荐 Apifox 平台,它可实现文档编写、调试、测试等,助于设计合格 API 文档。
本文介绍了 API 相关知识及 API 文档编写。先解释 API 是虚拟插口,遵循协议集成功能。接着说明通过 API 文档使用 API,阐述文档应包含基本信息、请求响应格式等元素。最后推荐 Apifox 平台,它可实现文档编写、调试、测试等,助于设计合格 API 文档。
要想弄清楚如何开始写出一份合格的 API 文档,我们需要首先了解什么是 API,它的使用场景有哪些,应该具备什么样的能力。
什么是 API?
想象一下,当小 A 购入了一台新的电脑后,希望将显示画面投射至一块色准极佳的屏幕上加以扩展。小 A 可以使用 HDMI 线将屏幕与电脑的 HDMI 接口连接,只见黑漆的屏幕瞬间有了灵动的画面。在这个过程中小 A 并不需要知道屏幕与电脑之间的画面是靠着什么参数进行传递的,也无需理解屏幕色彩显示的逻辑原理,只需掌握简单 HDMI 接口的使用方法就能够满足自己的需求。
与 HDMI 类似,API (Application Programming Interface,应用程序接口)本质上也是一个虚拟的插口。两个产品相互遵循同一套信息通讯协议,配对成功后将多个功能相互集成,协同发挥作用,起到 1+1 > 2 的效果。
如何使用 API?
答案当然是通过阅读 API 接口文档来了解如何使用 API。当第一次使用陌生的接口时,你需要一份清晰、详细的功能说明书来帮助了解接口的工作方式。这就是 API 文档的作用。API 文档是一份规范,它描述了应用程序编程接口(API)如何工作,并提供了使用 API 所需的所有信息。
可以将 API 文档想象成一个路线图或地图。它告诉使用者如何到达他们想要去的地方。就像地图一样,API 文档需要清晰、详细的说明,包括沿途路标、交通方式和路线标记,以便用户能够轻松地找到他们需要的信息,并正确地使用 API。

API 文档需具备什么元素?
在开始前我们可以通过阅读《如何读懂常见的接口文档?》了解接口文档相关的基础知识。
API 文档应该包括接口的基本信息,例如接口名称、版本和作者。此外,它还应该包含接口如何正常工作的详细信息,例如请求和响应格式、支持的请求参数、错误代码等等。除此之外接口文档还应提供示例代码,以帮助使用者更好地理解如何使用 API。
- 接口概述
简要介绍接口的目的和作用,就像在餐厅里看菜单一样。菜单可以告诉客人有哪些菜可以点,API 文档可以告诉开发者有哪些接口可以调用。菜单上的详细描述可以让客人了解每道菜品的特点和做法,API 文档也提供了详细的描述和示例,让开发者了解如何调用接口以及如何使用接口返回的数据。

接口概述
- 接口地址
接口地址向开发者说明在何处使用接口服务。
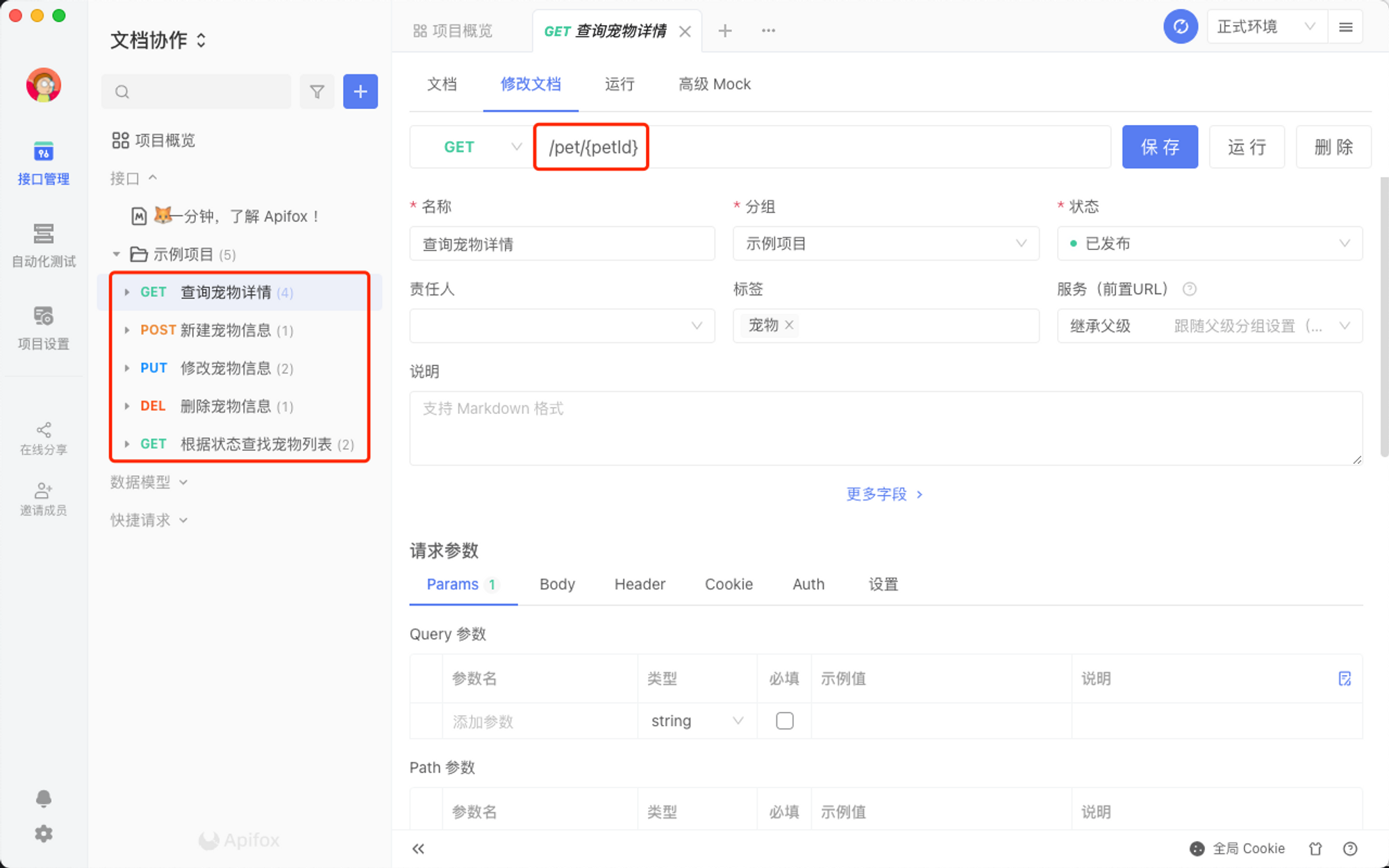
接口地址
- 请求参数
列出所有可用的参数及其说明,例如,每个参数的类型、默认值和限制条件等。
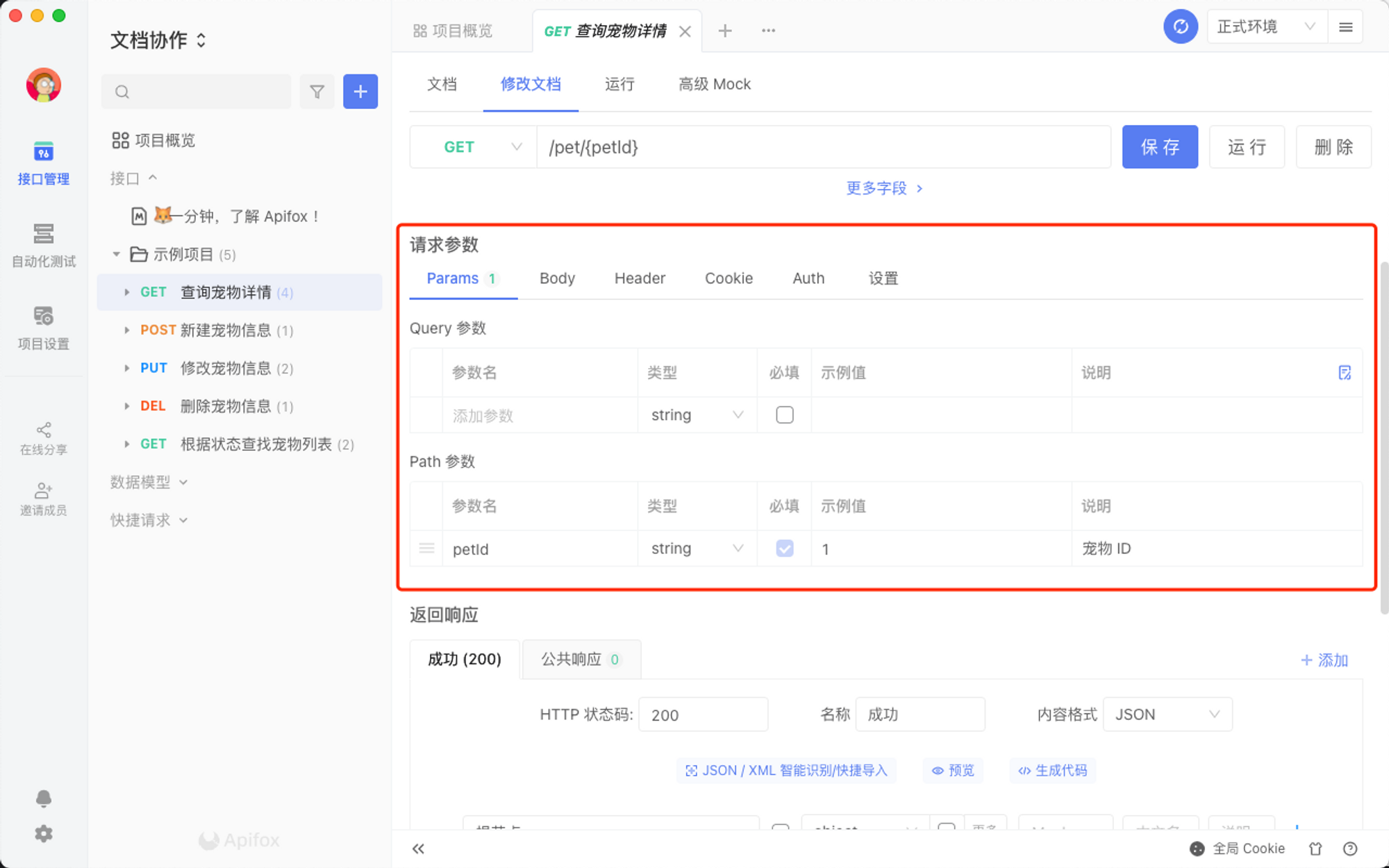
请求参数
- 返回响应
列出每个接口的响应格式,包括状态码、数据结构和数据类型等。

返回响应
- 响应示例
提供使用 API 的示例代码和数据,以便开发人员更好地理解如何使用 API。
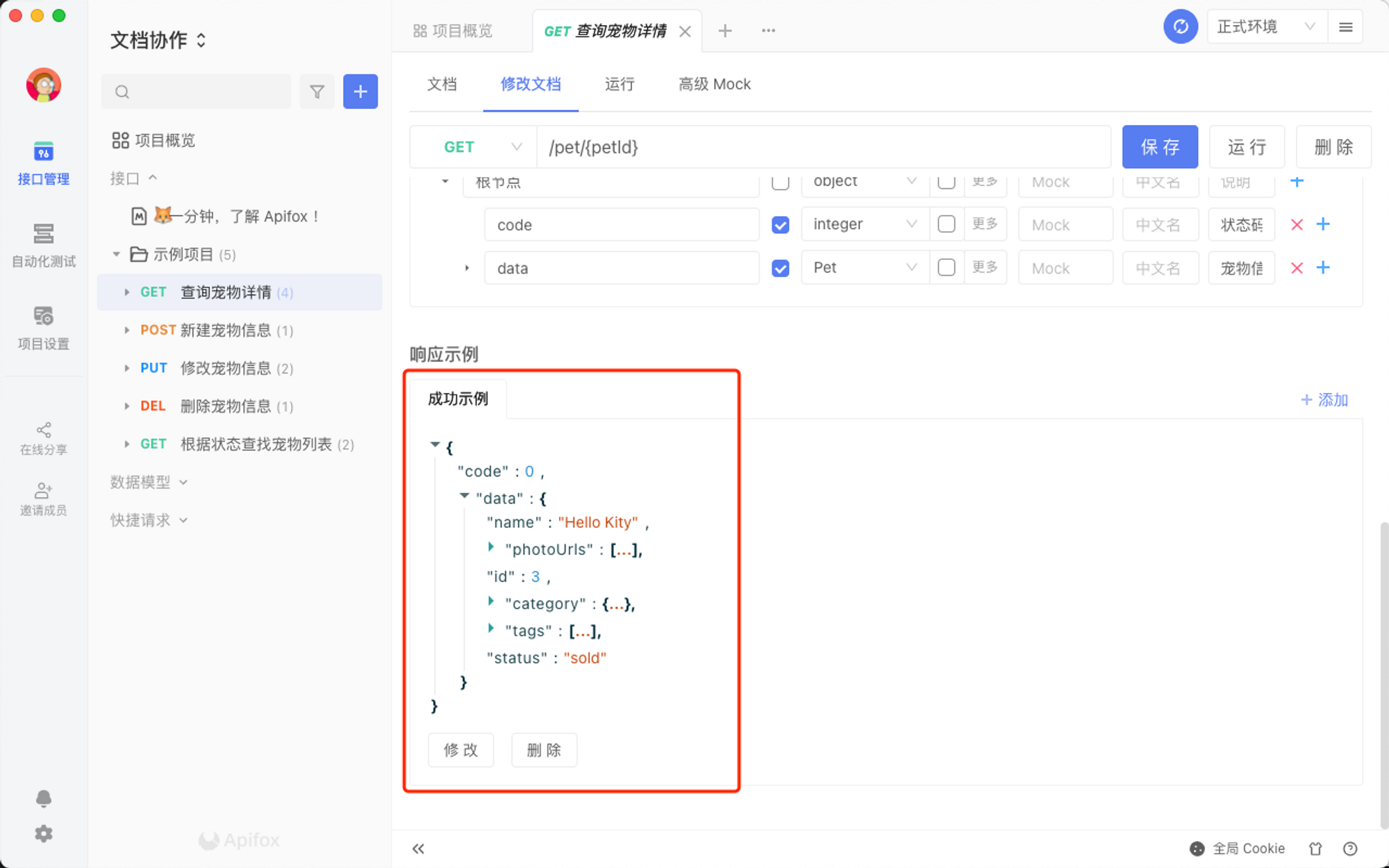
响应示例
Apifox 助你轻松编写接口文档
好的 API 文档是 API 成功的关键之一。没有清晰、详细的说明,用户很可能会遇到问题,从而导致应用程序出现故障。因此,当您编写 API 文档时,一定要确保它是易于理解和使用的。Apifox 是一体化 API 协作平台,可以实现 API 文档、API 调试、API Mock、 API 自动化测试,是更先进的 API 设计/开发/测试工具。有了 Apifox,设计出一份合格的 API 接口文档不再是难事。

2023最新Jmeter接口测试从入门到精通(全套项目实战教程)


















 1366
1366

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









