



 本文深入探讨了树上分治算法的应用,特别是在解决比特山飙车问题中的具体实现。通过对树状结构进行分治处理,算法能够有效地寻找路径上车道数量最多的合法道路。文章详细介绍了如何使用并查集更新树的直径,以及在合并树时进行的特判处理,提供了完整的代码实现。
本文深入探讨了树上分治算法的应用,特别是在解决比特山飙车问题中的具体实现。通过对树状结构进行分治处理,算法能够有效地寻找路径上车道数量最多的合法道路。文章详细介绍了如何使用并查集更新树的直径,以及在合并树时进行的特判处理,提供了完整的代码实现。
题目大意:
比特山是比特镇的飙车圣地。在比特山上一共有n 个广场,编号依次为1 到n,这些广场之间通过n - 1 条双向车道直接或间接地连接在一起,形成了一棵树的结构。
因为每条车道的修建时间以及建筑材料都不尽相同,所以可以用两个数字li; ri 量化地表示一条车道的承受区间,只有当汽车以不小于li 且不大于ri 的速度经过这条车道时,才不会对路面造成伤害。
Byteasar 最近新买了一辆跑车,他想在比特山飙一次车。Byteasar 计划选择两个不同的点S; T,然后在它们树上的最短路径上行驶,且不对上面任意一条车道造成伤害。
Byteasar 不喜欢改变速度,所以他会告诉你他的车速。为了挑选出最合适的车速,Byteasar 一共会向你询问m 次。请帮助他找到一条合法的道路,使得路径上经过的车道数尽可能多。
数据范围n,m<=70000.
题解:
(蒟蒻眼中)比较神的树上分治。做法分治[ l , r ] :(丑图奉上)
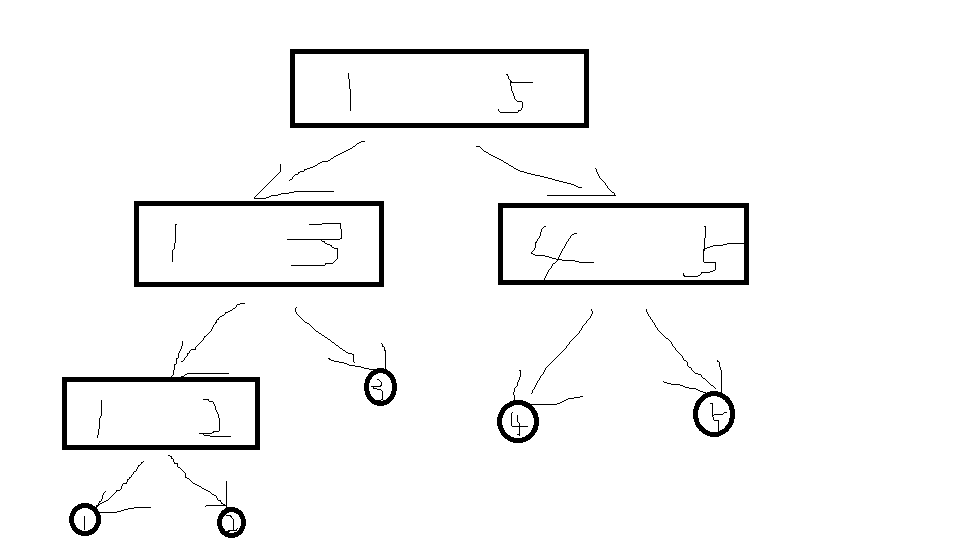
其中每一个矩形代表分治区间,圆代表提取答案的地方。
每当访问到矩形/圆时,将对应区间加的边更新并查集,然后不断用新集的直径更新当前答案。
(ps.当两棵树合并时,新树的直径一定在旧树的端点中产生。这里需要6次特判。)
每当返回时,将原来的更新取消。可以先记录栈的tl,然后将栈还原。
细节比较多,详细见代码:
upd:由于之前代码太丑被和谐,附上新代码:


#include<cstdio> #include<cstring> #include<algorithm> using namespace std; const int N = 70050; template<typename T> inline void read(T&x) { T f = 1,c = 0;char ch=getchar(); while(ch<'0'||ch>'9'){if(ch=='-')f=-1;ch=getchar();} while(ch>='0'&&ch<='9'){c=c*10+ch-'0';ch=getchar();} x = f*c; } int n,m,hed[N],cnt,dep[N],siz[N],fa[N],son[N],tp[N]; struct EG { int to,nxt; }e[N<<1]; void ae(int f,int t) { e[++cnt].to = t; e[cnt].nxt = hed[f]; hed[f] = cnt; } void dfs1(int u,int f) { fa[u]=f,dep[u]=dep[f]+1,siz[u]=1; for(int j=hed[u],to;j;j=e[j].nxt) if((to=e[j].to)!=f) { dfs1(to,u),siz[u]+=siz[to]; if(siz[son[u]]<siz[to])son[u]=to; } } void dfs2(int u,int Top) { tp[u] = Top; if(!son[u])return ; dfs2(son[u],Top); for(int j=hed[u],to;j;j=e[j].nxt)if((to=e[j].to)!=fa[u]&&to!=son[u]) dfs2(to,to); } int get_lca(int x,int y) { while(tp[x]!=tp[y]) { if(dep[tp[x]]<dep[tp[y]])swap(x,y); x = fa[tp[x]]; } return dep[x]<dep[y]?x:y; } int get_dis(int x,int y){return dep[x]+dep[y]-2*dep[get_lca(x,y)];} struct Tree { int a,b,w; Tree(){} Tree(int a,int b,int w):a(a),b(b),w(w){} Tree operator + (const Tree&x)const { Tree ret = Tree(a,b,w);int tmp; if(ret.w<x.w)ret=x; tmp=get_dis(a,x.a);if(ret.w<tmp)ret=Tree(a,x.a,tmp); tmp=get_dis(a,x.b);if(ret.w<tmp)ret=Tree(a,x.b,tmp); tmp=get_dis(b,x.a);if(ret.w<tmp)ret=Tree(b,x.a,tmp); tmp=get_dis(b,x.b);if(ret.w<tmp)ret=Tree(b,x.b,tmp); return ret; } }; int ans[N]; struct segtree { struct point { Tree s; int ff,siz; }p[N]; struct node { int u;point p0; node(){} node(int u,point p0):u(u),p0(p0){} }sta[N<<5]; int hd[N<<2],ct,tl; struct edge { int u,v,nxt; }E[N<<5]; void ae(int f,int u,int v) { E[++ct].u = u; E[ct].v = v; E[ct].nxt = hd[f]; hd[f] = ct; } void insert(int l,int r,int u,int ql,int qr,int&lp,int&rp) { if(l==ql&&r==qr){ae(u,lp,rp);return ;} int mid = (l+r)>>1; if(qr<=mid)insert(l,mid,u<<1,ql,qr,lp,rp); else if(ql>mid)insert(mid+1,r,u<<1|1,ql,qr,lp,rp); else insert(l,mid,u<<1,ql,mid,lp,rp),insert(mid+1,r,u<<1|1,mid+1,qr,lp,rp); } int findff(int u){return u==p[u].ff?u:findff(p[u].ff);} void merge(int u,int v,int&now) { u = findff(u),v = findff(v); if(u==v)return ; if(p[u].siz>p[v].siz)swap(u,v); sta[++tl]=node(u,p[u]),sta[++tl]=node(v,p[v]); p[v].s=p[v].s+p[u].s,p[u].ff=v; if(p[u].siz==p[v].siz)p[v].siz++; now = max(now,p[v].s.w); } void rep(int las) { while(tl!=las)p[sta[tl].u]=sta[tl].p0,tl--; } void sol(int l,int r,int u,int now) { int tim = tl; for(int j=hd[u];j;j=E[j].nxt) merge(E[j].u,E[j].v,now); if(l==r){ans[l]=now;rep(tim);return ;} int mid = (l+r)>>1; sol(l,mid,u<<1,now);sol(mid+1,r,u<<1|1,now); rep(tim); } }tr; int main() { // freopen("tt.in","r",stdin); read(n),read(m); for(int u,v,l,r,i=1;i<n;i++) { read(u),read(v),read(l),read(r); ae(u,v),ae(v,u);tr.insert(1,n,1,l,r,u,v); } dfs1(1,0),dfs2(1,1); for(int i=1;i<=n;i++) tr.p[i].ff=i,tr.p[i].siz=1,tr.p[i].s=Tree(i,i,0); tr.sol(1,n,1,0); for(int i=1,x;i<=m;i++) read(x),printf("%d\n",ans[x]); return 0; }

















 519
519

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









