




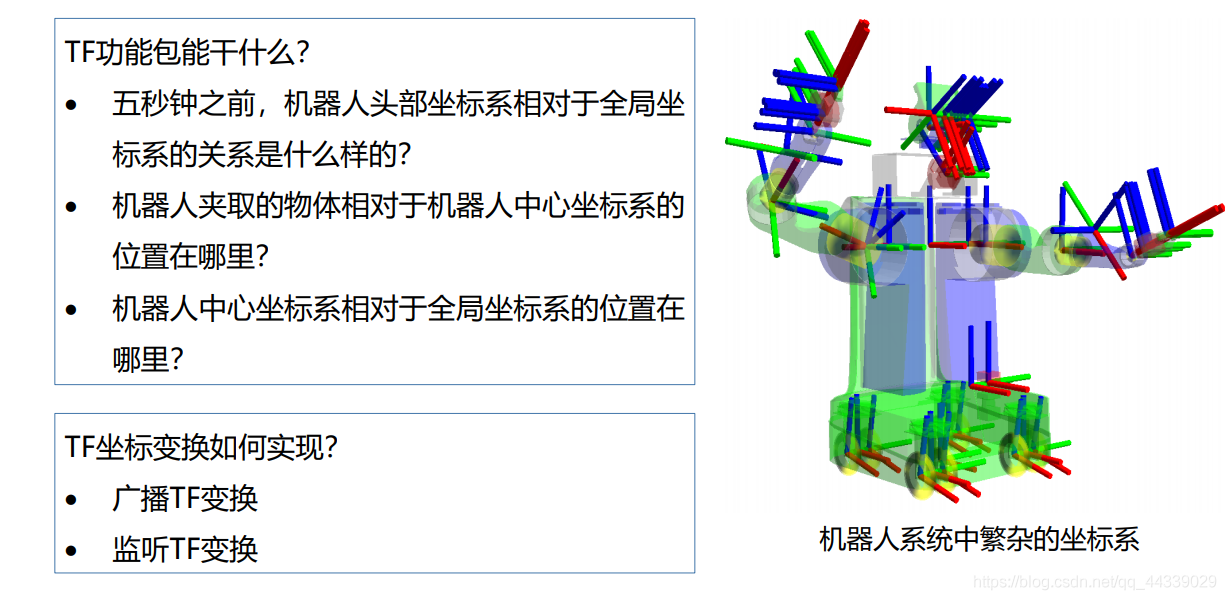
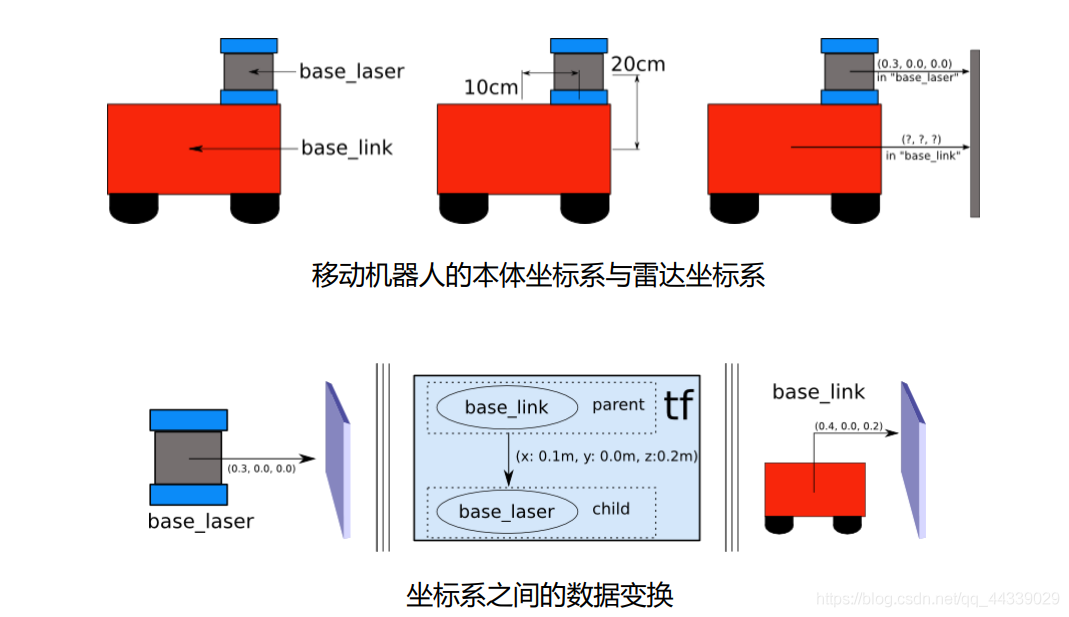
1、TF功能包可以记录10秒钟之内的机器人所有坐标系之间的位置关系,TF坐标变换是通过监听和广播的机制实现的,当我们启动节点管理器和TF之后,就会在后台去维护一个TF树
2、本部分我们要实现的内容是通过键盘控制第一个海龟移动,让另一个海龟通过TF坐标变换自动的跟踪第一个海龟
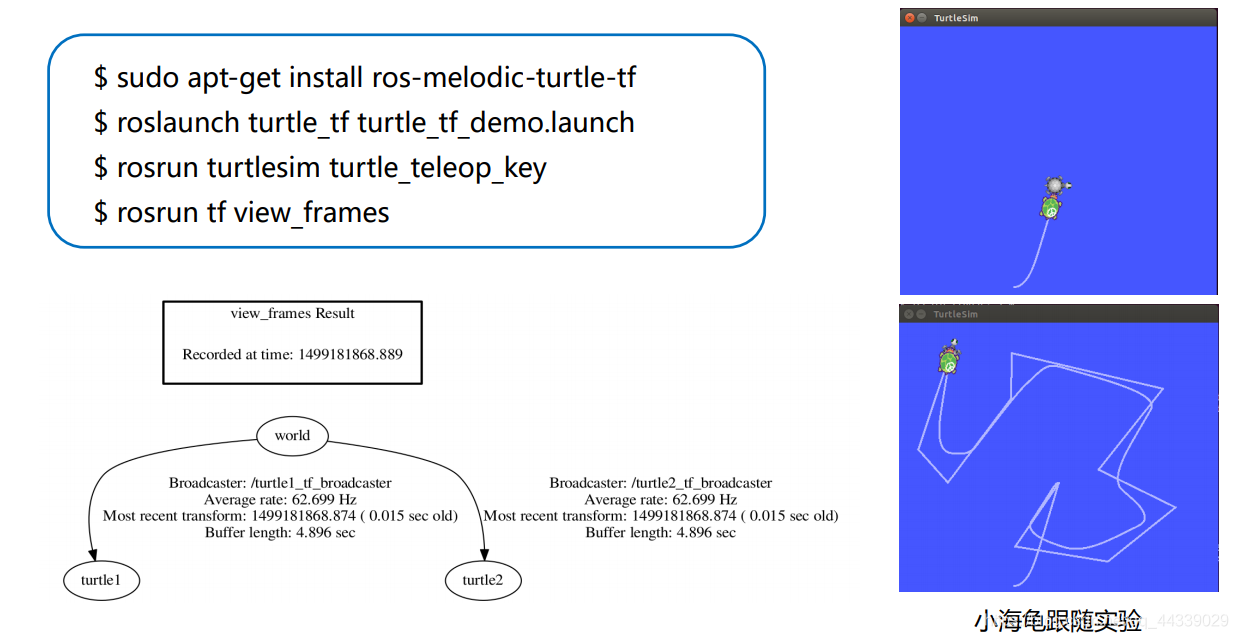
3、接下来需要通过以下指令来安装turtle-tf示例的功能包
sudo apt-get install ros-melodic-turtle-tf
注意这个地方因安装的ROS的版本不同,安装语句也不同,比如我安装的ROS是noetic版本,而不是上面那条语句中的melodic版本,需要将该语句中的melodic改为noetic,如下所示:
sudo apt-get install ros-noetic-turtle-tf 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









