 热门ROS功能包概览
热门ROS功能包概览








在github上最热门最受欢迎的ROS相关功能包

下面依次列出,排名不分先后:
1 Simulation Tools In ROS

https://github.com/ros-simulation
2 ROS-Industrial

https://github.com/ros-industrial
3 ROS Perception: where standard perception stuff is maintained

https://github.com/ros-perception
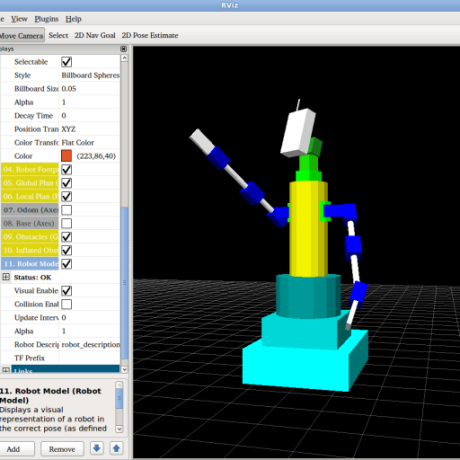
4 ros-visualization

https://github.com/ros-visualization
5 ROS core stacks

6 ROS 2.0

7 ROS Planning
https://github.com/ros-planning

8 ROS device drivers
https://github.com/ros-drivers
------------------------------------------------------------------------
https://github.com/pirobot

https://github.com/intel-ros

https://github.com/robopeak
https://github.com/introlab
https://github.com/hbrobotics

https://github.com/AutonomyLab

https://github.com/code-iai

https://github.com/felixendres
https://github.com/tum-vision
https://github.com/AaronMR


















 1625
1625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











