



3D传感器是实现深度感知的核心技术。这些传感器广泛应用于多种常见的3D视觉技术中,例如立体相机、激光雷达(LiDAR)、飞行时间(ToF)相机和激光三角测量。
通常根据应用场景和技术要求选择合适的3D视觉方案,不同技术各有其优势。例如,激光雷达和激光三角测量技术,由于内置诸如旋转镜等运动部件,因此不适合在恶劣环境中使用。
立体相机更适合户外应用场景,原因在于立体相机不易受到阳光直射的干扰。例如,相较于其他3D传感器,立体相机在成本方面更具优势。立体相机在计算图像中的3D数据时,相较于上述其他技术,需要更高的计算能力。同时,部分立体相机具备板载处理能力,可减轻主机的数据处理负担。此外,立体相机还可提供彩色图像和彩色点云,而其他主流3D视觉技术则通常需另配彩色相机。
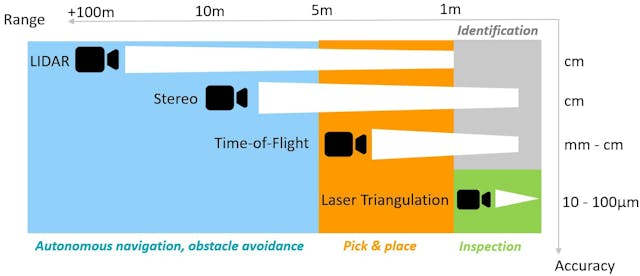
不同3D视觉技术在测量范围与精度之间往往需要权衡。
对于任何类型的视觉传感器而言,测量范围与精度之间通常存在权衡关系。例如,远程传感器的精度相对较低,而短距离传感器则具有较高的精度。在测距能力方面,激光雷达具备最远的测距能力,其次是立体相机,最后是渡越时间传感器。激光三角测量的覆盖范围虽然最短,但其精度却更高。
远距离性能对于实现自主导航与障碍物规避至关重要,而中距离性能则更适用于拾取-放置操作。近距离范围探测主要则用于物体的识别与检查。
立体工业相机的应用
立体相机因其在测量范围与精度方面的灵活性,广泛适用于大多数仓储机器人应用场景。这类相机具备较高的性价比,结构坚固耐用,同时可输出用于目标识别的彩色图像。
在工业领域中,立体相机主要应用于两类机器人系统:自主移动机器人(AMR)和取放机器人。
AMR系统通过立体相机执行SLAM(同步定位与建图),一方面构建环境地图,另一方面实现自身在地图中的定位。AMR能够规划前往指定目的地的路线,同时精准检测障碍物(包括物体/行人),并灵活地在这些障碍物周围导航。
标准立体相机在AMR应用中的特征/要求如下:
-
高帧率
-
低延迟
-
坚固可靠
-
校准保留
-
宽视野
-
远距离工作能力
-
高动态范围,以适应室内外不同光照条件
立体相机在取放机器人中的应用实例
取放机器人系统应用的关键组件包括:感知环境的视觉系统、用于数据处理和决策的控制系统,以及具备抓取或吸附功能的机械臂。此类取放机器人广泛应用于装配、码垛、拆垛及料箱分拣等多种工业任务。
以料箱分拣为例,其目标是从容器中移除随机放置的物体。在这些应用中,视觉系统用于识别和定位目标物体,随后计算其方位,确保抓手能够精准抓取。然后,控制系统规划出机器人的移动路径,有效避开途中的障碍物。最后,机器人顺利拾起物体,并将其放置于指定位置。
标准立体相机在该类取放机器人应用中的特征/要求如下:
-
高精度
-
低延迟
-
坚固可靠
-
校准保留
-
能够在多尘/高湿度等工业环境中运行
-
针对不同大小的物体,需要在视野和工作距离上具备灵活性
Bumblebee X立体相机
Teledyne FLIR IIS的Bumblebee X立体相机,该产品配备工业级(IP67防护等级)、5千兆以太网接口,并集成板载处理能力的立体视觉系统。

Bumblebee X立体相机的主要特点:
高分辨率与高精度
搭载立体图像处理算法,实现板载处理
24 厘米基线的远距离工作
灵活的视野选项(60、80 和 105 度)
长时间的校准保留
兼容外部图案投影仪
支持Robot OS和GenICam接口


















 255
255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









