



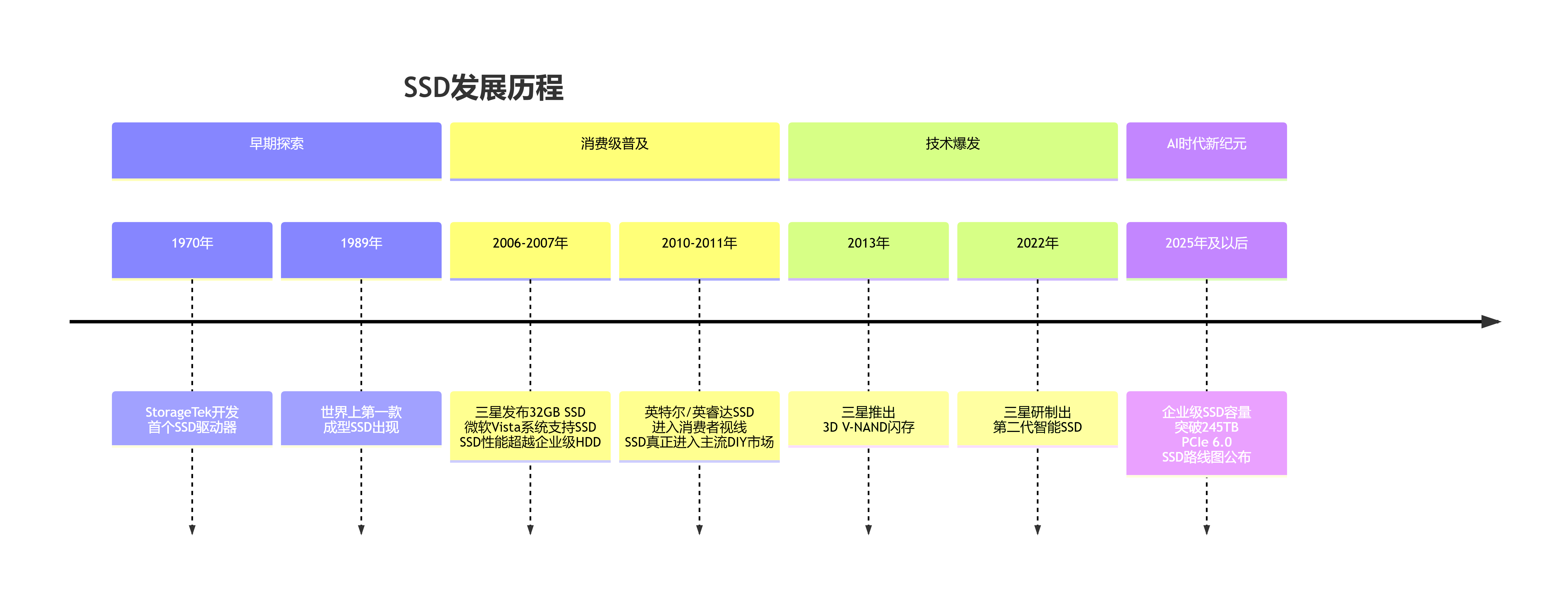
固态硬盘(SSD)的发展,是一部从实验室走向千家万户、从昂贵军用品变为核心AI基础设施的创新史诗。下面这张时间轴,帮你快速梳理其发展脉络。
📈 从实验室到千家万户
固态硬盘的早期构想可追溯到上世纪70年代,当时StorageTek公司开发了第一个SSD驱动器。1989年,世界上第一款成型的固态硬盘出现,但因其高昂的成本和尚不成熟的技术,主要局限于医疗、航空和军事等专业领域。
转机出现在2006-2007年:三星在2006年3月开始供货1.8寸32G容量的SSD;微软发布Windows Vista系统,首次完整支持SSD;也正是在2007年,SSD性能首次超越了企业级HDD旗舰型号,并开始正式进军消费级市场。
到2010年,随着英特尔X25系列、英睿达C300系列进入国内消费者视线,更多用户开始体验到SSD带来的性能飞跃。2011年初,随着英特尔、英睿达及采用SandForce第二代主控的各种SSD产品上市,SSD开始真正进入国内PC的主流DIY市场。

🚀 核心技术的三次飞跃
回顾SSD的发展,其性能的飙升主要归功于三大核心技术的突破。
-
闪存颗粒:从2D到3D的容量革命
早期SSD采用2D平面结构的NAND闪存,容量提升很快遇到瓶颈。2013年,3D NAND闪存技术(三星称之为VNAND)成功实现了闪存颗粒从“平房”到“高楼”的跨越,通过垂直堆叠存储单元,大幅提升了存储密度和降低了成本。
此外,每个存储单元存储的位数也在增加,从SLC(1位/单元)到MLC(2位/单元),再到目前主流的TLC(3位/单元)和QLC(4位/单元)。QLC技术虽然寿命和速度有所妥协,但在大容量和低成本方面优势显著,是企业级大容量SSD崛起的关键。
-
接口与协议:数据通道的极速拓宽
SSD的性能发挥离不开高速的数据通道。接口从SATA到PCIe的演进是速度提升的关键。协议方面,NVMe协议专为闪存特性设计,相比旧的AHCI协议,能极大降低延迟,释放PCIe接口的潜力。
PCIe标准自身也在快速迭代,从Gen 3的最大带宽16GB/s,到Gen 4带宽翻倍至32GB/s,直至最新的PCIe Gen 5,带宽达到64GB/s,让SSD的顺序读取速度突破14,000MB/s。而PCIe 6.0也已经提上日程,预计将在2026年带来新一轮性能飞跃。

-
形态与智能:适应多元场景
SSD的物理形态也在不断进化,从2.5英寸盘发展到更紧凑的M.2形态,节省了大量空间。针对数据中心和AI工作负载,又出现了E1.S等新规格,旨在优化散热和密度。
此外,SSD也变得越来越“智能”。三星在2022年研制出的第二代智能SSD(Smart SSD)就是代表,它允许部分计算任务直接在硬盘上执行,减轻CPU负担,特别适合AI推理等场景。
🔮 未来趋势与展望
面向未来,SSD的发展正围绕“更大、更快、更智能”这三个方向加速演进。
-
容量迈向新高度
为满足AI数据中心对海量数据存储的需求,单盘容量正持续突破。Solidigm计划在2026年底推出245TB 的SSD,而三星也展示了其512TB级容量的PCIe 6.0 SSD路线图。 -
性能与生态的协同进化
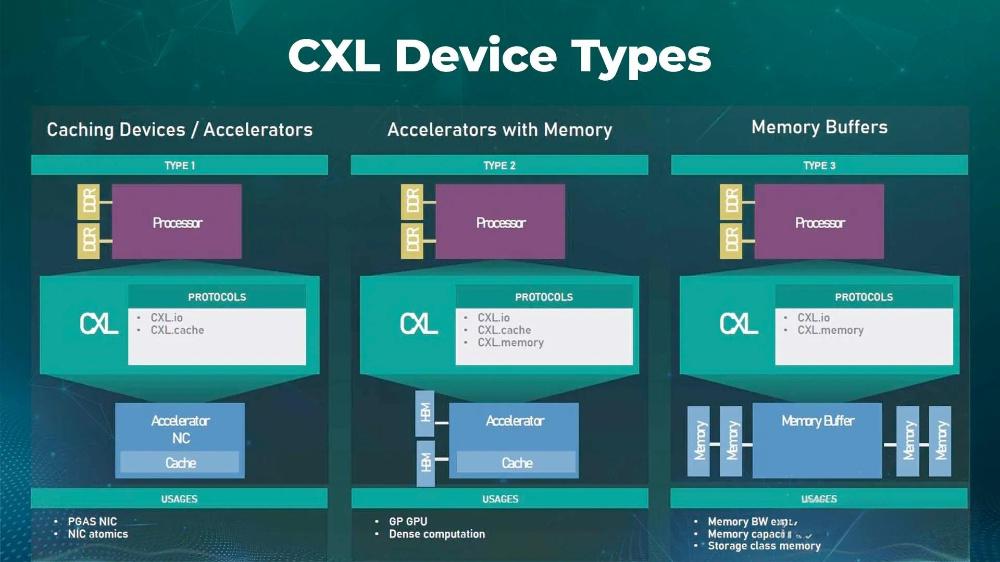
PCIe 6.0接口标准将于2026年逐步落地,能提供比PCIe 5.0翻倍的带宽。同时,CXL(Compute Express Link) 协议将与NVMe协同,更高效地连接SSD与CPU/GPU,减少延迟,这对于AI训练等高负荷应用至关重要。
-
在AI时代重新定义存储角色
在AI时代,存储系统的重要性空前提升。一方面,Nearline SSD(近线固态硬盘)正以其优异的性能和容量平衡,替代传统HDD来满足AI推理服务爆发式增长带来的大容量存储需求。另一方面,智能SSD的发展,使得存储设备不再仅仅是被动保存数据的地方,更能主动参与计算,初步实现了 “存算一体” 的构想。
希望这份关于固态硬盘发展史的梳理,能帮助你更好地理解这项深刻改变了我们数字生活的伟大技术。如果你对特定类型或适用场景的SSD有进一步的兴趣,我很乐意与你继续探讨。


















 3100
3100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









