




 本文详细介绍了如何搭建MyBatis开发环境,包括使用Navicat创建数据库、创建Maven项目、设置目录类型、引入相关依赖、编写数据库连接配置文件、日志文件以及核心配置文件的步骤,最后展示了核心配置文件的代码片段。
本文详细介绍了如何搭建MyBatis开发环境,包括使用Navicat创建数据库、创建Maven项目、设置目录类型、引入相关依赖、编写数据库连接配置文件、日志文件以及核心配置文件的步骤,最后展示了核心配置文件的代码片段。
准备数据库
我个人使用的是Navicat工具,先建一个数据库,可以直接点击创建数据库(先创建然后右键创建数据库):

也可以使用SQL语句创建:create database mybatis;
创建Maven项目
File→new→project
在New Project对话框:

然后下一步
Properties:
(Name:archetypeCatalog
value:internal)

工程创建好后,工程目录结构如下,在src/main/下面创建java ·resources两个目录,选中 src/main/ ,右键点击,选中新建目录,输入目录名字。在src下面建立test文件夹,并在test文件夹下建立java · resource,建好后目录结构如下
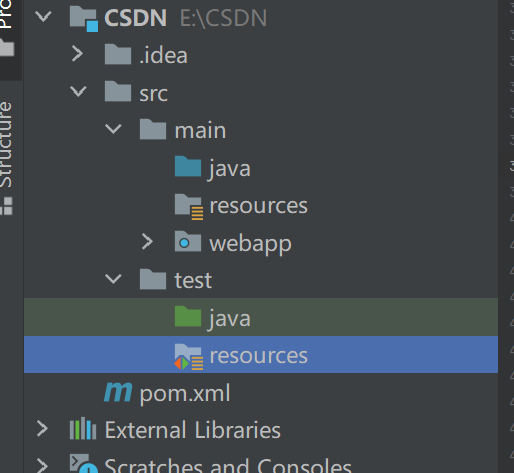
设置java ·resources目录的类型,选中要设置的目录,右键选择将目录标记为,然后选择特定的类型。设置完后不同类型的目录图标颜色不一样,如上图:
main/java->源根
main/resources->资源根
testljava->测试源根
testresources->测试资源根
引入相关依赖
Maven使用Maven仓库管理jar包,需要将jar包的依赖引入项目的pom.xml文件中就可以调用jar包中的类,需要引入四个依赖:MySQL驱动包、JUnit测试包、MyBatis核心包、log4j。引入后记得点击刷新才算成功引入。(一般Junit测试包系统已经帮我们写了所以只需要引入三个驱动就可以了)。
第一种方法:可以去网站上查找四个依赖并导入(可点击)
第二种方法:(注意是放在<dependencies></dependencies>标签里)可直接复制并刷新导入:
<dependencies>
<dependency>
<groupId>junit</groupId>
<artifactId>junit</artifactId>
<version>4.11</version>
<scope>test</scope>
</dependency>
<dependency>
<groupId>org.mybatis</groupId>
<artifactId>mybatis</artifactId>
<version>3.5.2</version>
</dependency>
<dependency>
<groupId>mysql</groupId>
<artifactId>mysql-connector-java</artifactId>
<version>8.0.26</version>
</dependency>
<dependency>
<groupId>log4j</groupId>
<artifactId>log4j</artifactId>
<version>1.2.12</version>
</dependency>
</dependencies>编写数据库连接信息配置文件
在项目的src/main/resources目录下新建数据库连接的配置文件(普通文件,后面会变),这里将其命名为db.properties,在该文件中配置数据连接的参数为:
mysql.driver=com.mysql.cj.jdbc.Driver
mysql.url=jdbc:mysql://localhost:3306/mybatis?serverTimezone=UTC&characterEncoding=utf-8
mysql.username=root
mysql.password=root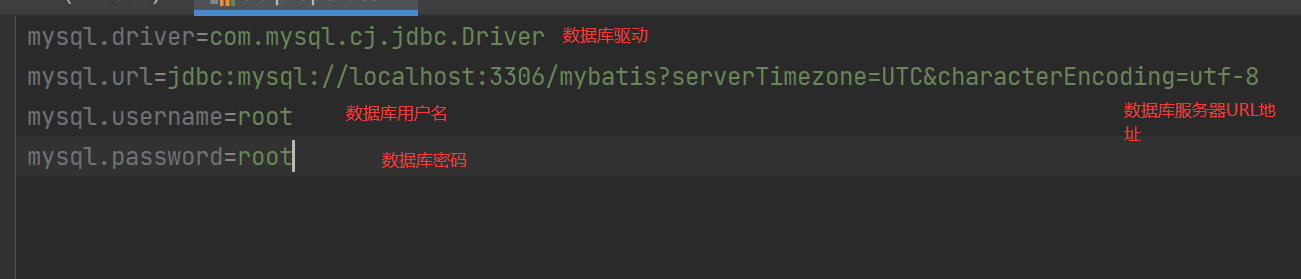
编写日志文件
在项目的src/main/resources目录下创建日志文件,这里必须命名为log4j.properties
# Global logging configuration
log4j.rootLogger=ERROR, stdout
# MyBatis logging configuration...
log4j.logger.com.fh=DEBUG
# Console output...
log4j.appender.stdout=org.apache.log4j.ConsoleAppender
log4j.appender.stdout.layout=org.apache.log4j.PatternLayout
log4j.appender.stdout.layout.ConversionPattern=%5p [%t] - %m%n编写核心配置文件
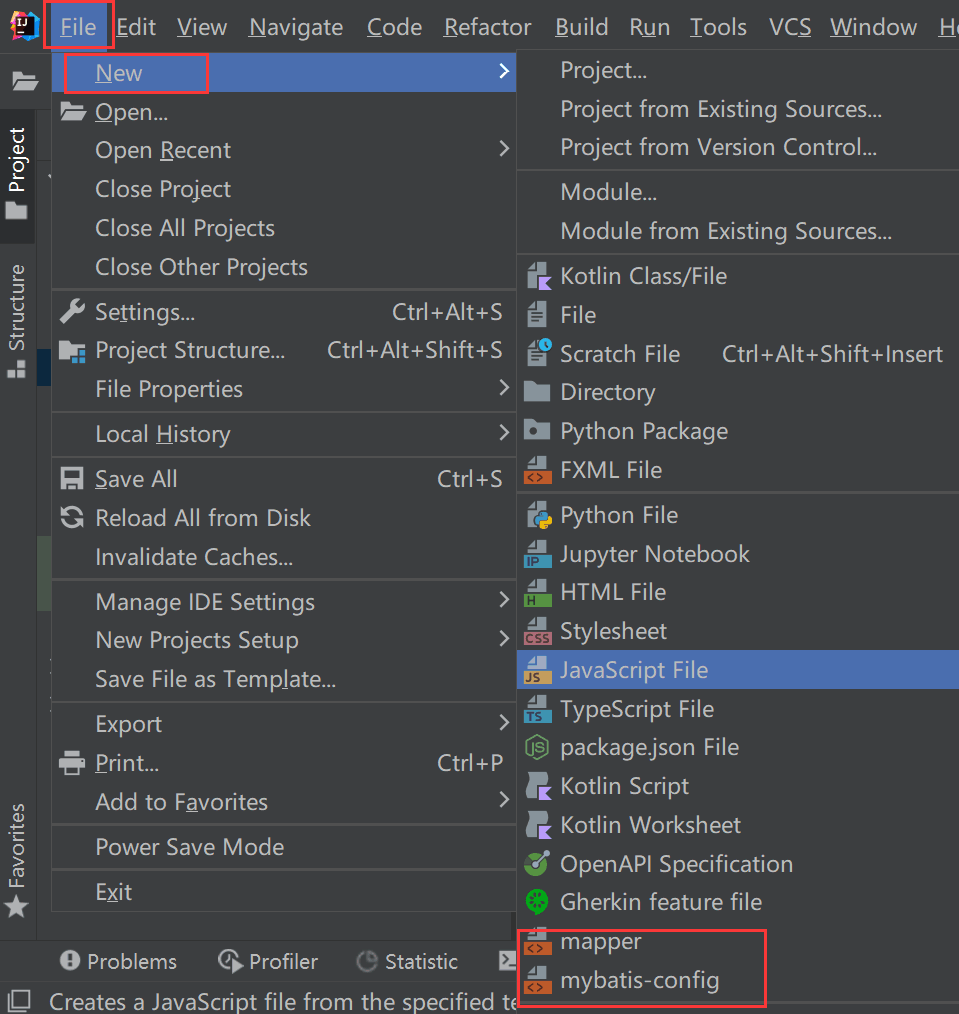
查看是否有图中的两个文件模板有的话直接点击,没有可以自行配置如下:
第一个:核心配置文件模板
File →settings,搜索《文件和代码模板》,
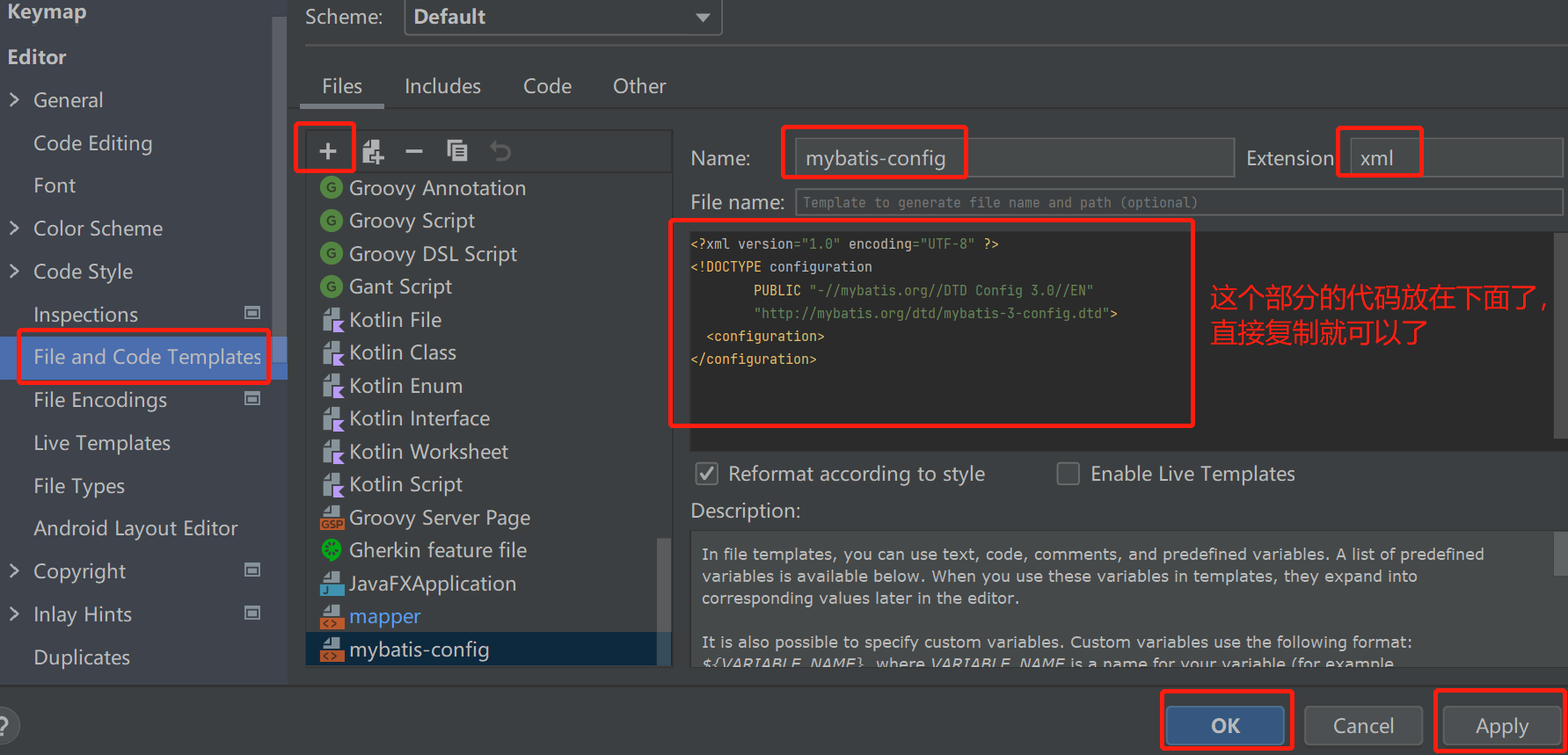
<?xml version="1.0"encoding="UTF-8" ?>
<!DOCTYPE configuration PUBLIC "-//mybatis.org//DTD Config3.0//EN"
"http://mybatis.org/dtd/mybatis-3-config.dtd">
<configuration>
</configuration>第二个:映射文件模板
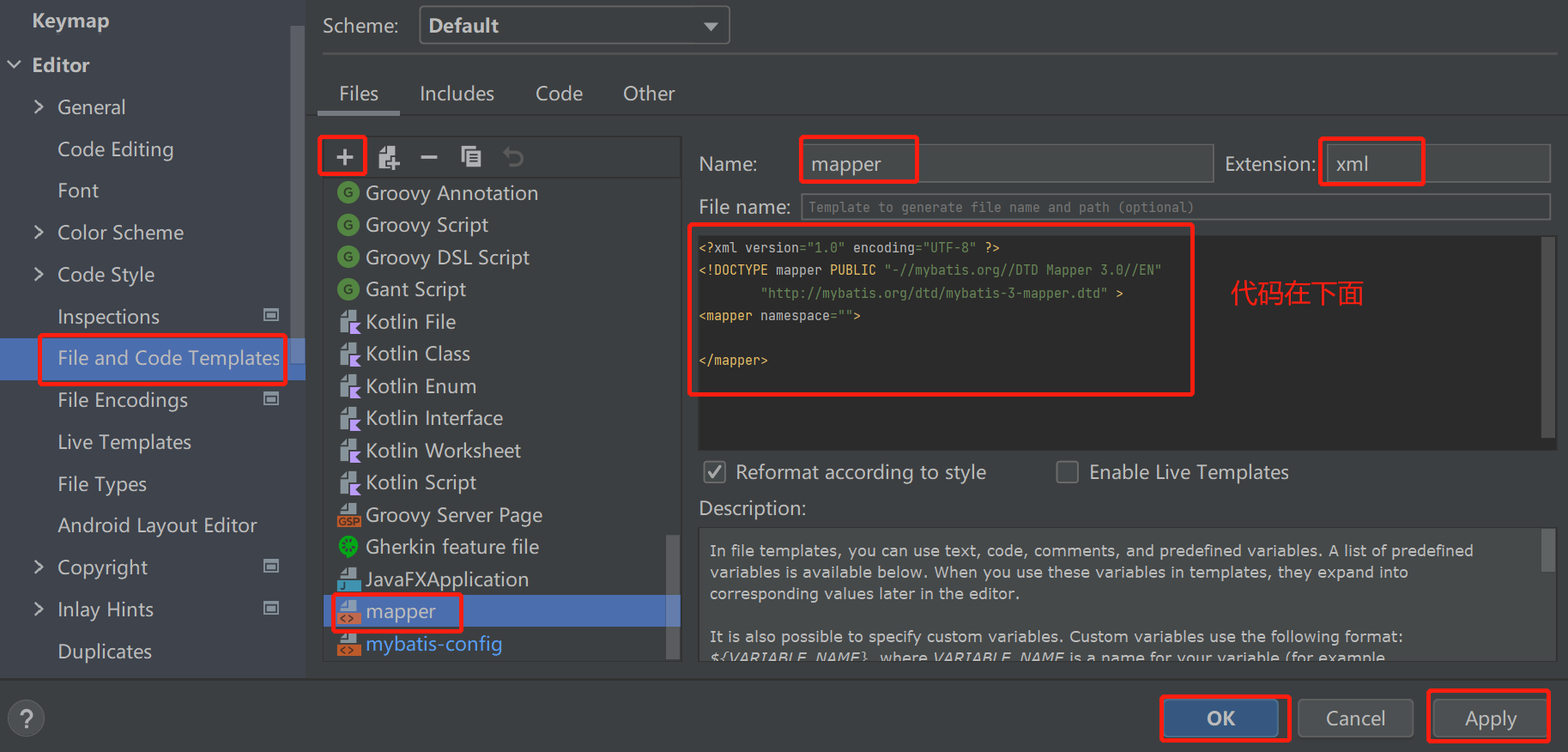
<?xml version="1.0" encoding="UTF-8" ?>
<!DOCTYPE mapper PUBLIC "-//mybatis.org//DTD Mapper 3.0//EN"
"http://mybatis.org/dtd/mybatis-3-mapper.dtd" >
<mapper namespace="">
</mapper>这样模板就配好了,点击File →New就可以看到这两个模板了
点击File →New→mybatis-config(一般来说我们习惯命名为mybatis-config.xml) →OK
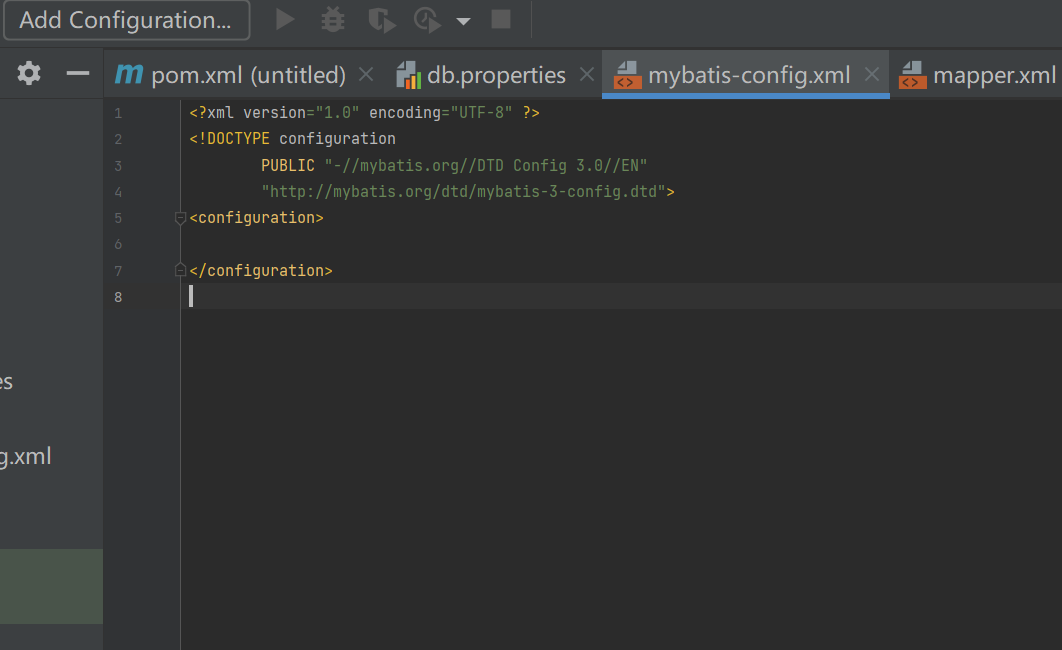
在<configuration></configuration>标签之间插入以下代码
<properties resource="db.properties"></properties>
<environments default="development">
<environment id="development">
<transactionManager type="JDBC"></transactionManager>
<dataSource type="POOLED">
<property name="driver" value="${mysql.driver}"/>
<property name="url" value="${mysql.url}"/>
<property name="username" value="${mysql.username}"/>
<property name="password" value="${mysql.password}"/>
</dataSource>
</environment>
</environments>到这里mybatis的开发环境搭建就完成了

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









