






?()表达式:
在之前的规则中,常常会像下面这样写。
__GET as $sourceaa(* #{include: <<<CODE* & $sourceCODE}-> as $sink)
比较诟病的是,这样找到的sink 点并非真正的sink 点,而是topdef之后的结果。?()的出现类似于?{},都是对中间结果进行过滤,然后影响结果的值。
样例:
<?phpa(1,2);a($a,2);//参数中含有consta?(*?{opcode: const}) as $sink//参数1为consta?(*?{opcode: const},) as $sink//参数1,2均为consta?(*?{opcode: const},*?{opcode: const}) as $sink

Webshell 大家并不陌生,无论是红蓝中对 webshell 的检测还是免杀,也是老生常谈的问题。在2023年,我也参加过伏魔挑战赛,我也会用一部分我对 webshell 的理解和 ssa 结合,重新对 WebShell 审视 source 和 sink ,并且针对 WebShell 实现一些规则。
在 PHP 漏洞挖掘的过程中,我们常常认为 Source 点为 $_GET、$_POST、$_REQUEST、headers 等一系列全局可控函数,sink 点尝尝为 eval、system 等一系列常见的代码执行 /命令执行的代码中,但是在 PHP 是动态运行。支持 php 中的常见间接函数调用。

那么从 WebShell 的编写来说,我们常常需要绕过一些常规的 Sink 点,像REQUEST、POST、GET 等一些常规的 source 点都会被 ban 掉,那么是否存在一些冷门的 source 点呢?
冷门 source 点:
-
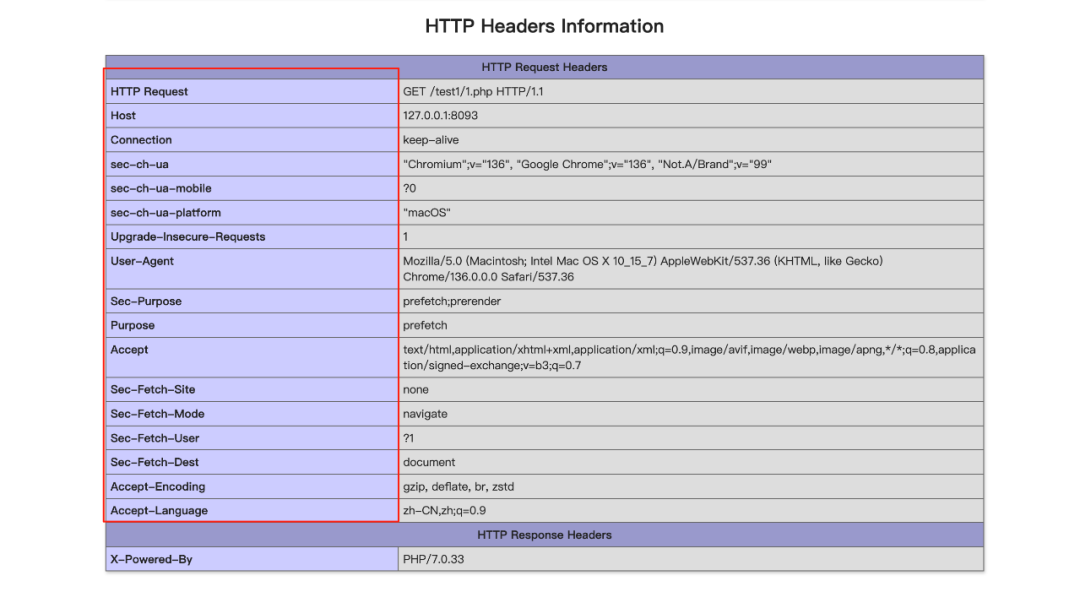
phpinfo()
在phpinfo中,会打印出这次请求的全部信息,可以当作一个非常规source点去用。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2288
2288

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









