




 本文深入讲解了数据在计算机中的存储方式,包括不同类型数据的存储形式、整型的原码、反码、补码概念及补码的重要性,浮点数遵循的IEEE 754标准,以及大小端的区别。
本文深入讲解了数据在计算机中的存储方式,包括不同类型数据的存储形式、整型的原码、反码、补码概念及补码的重要性,浮点数遵循的IEEE 754标准,以及大小端的区别。
重点内容
前言
数据,是编程语言的组成元素,也是我们编码所要处理的目标,程序运行的过程中就是在不断地创建、运算、处理各种各样的数据。本篇博客将深入的介绍各种数据类型以及他们在计算机中的存储
一、数据类型的详细介绍
数据类型介绍
c语言中基本的内置类型有以下几种:
char //字符数据类型
short //短整型
int //整型
long //长整型
long long //更长的整型
float //单精度浮点型
double //双精度浮点型注意:c语言没有字符串类型
各种类型在不同操作系统下所占用的内存空间不同,如long型在32位操作系统和64位操作系统下占用内存分别为4字节和8字节。
类型的基本归类
整数类型:
char、short、int、long
浮点数类型:
float、double
构造类型:
数组类型
结构体类型 struct
枚举类型 enum
联合体类型 union
指针类型:
int *pi;
char *pc
float *pf
void *pv
…
空类型:
void 表示空类型(无类型)
通常用于函数的返回类型、函数的参数、指针类型。
二、整型在内存中的存储
一个变量的创建是要在内存中开辟空间的,空间大小是根据不同的类型以及不同的操作系统决定的。那么数据在开辟的内存中是如何存储的呢?
比如:
int a=20;
int b=-10;
我们知道计算机为a分配了四个字节的空间,那这四个字节每个比特位都是如何存储的?
先了解下面的概念:
原码、反码、补码
计算机中的有符号数有三种表示方法,即原码、补码、反码。
三种表示方法都有符号位和数值位两部分,符号位都是用0表示正,用1表示负,而数值位三种表示方法各不相同。原码
直接将二进制按照正负数的形式翻译成二进制就行
反码
将原码符号位不变,其他位依次按位取反得到反码
补码
反码+1就得到补码
正数的原码反码补码都相同。
对于整形来说:数据存放内存中其实存放的是补码
为什么?
在计算机系统中,数值一律用补码来表示和存储。原因在于,使用补码,可以将符号位和数值域统一处理;同时,加法和减法也可以统一处理(CPU只有加法器),此外,补码与源码相互转换,其运算过程是相同的,不需要额外的硬件电路。
看一下内存中两个变量的存储:
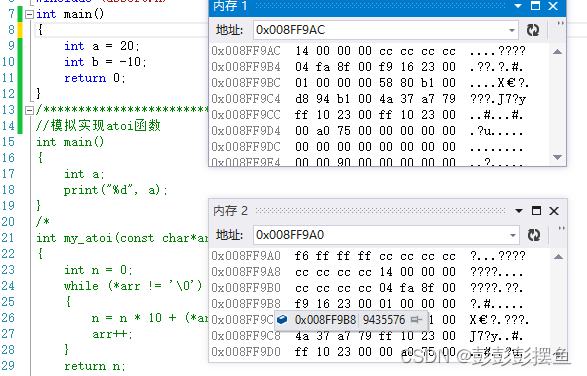
可以看到对于a和b都存储的是补码,但是顺序并不是所预想的 00 00 00 14
为什么呢?这就牵扯到另一个知识点了:大小端。
大小端介绍
什么是大端小端:
大端存储模式,是指数据的低位保存在内存的高地址中,而数据的高位,保存在内存的低地址中;
小端存储模式,是指数据的低位保存在内存的低地址中,而数据的高位,保存在内存的高地址中;
为什么有大端和小端:
因为在计算机系统中,我们是以字节为单位的,每个地址单元都对应着一个字节,一个字节为8bit。
但是在C语言中除了8bit的char之外,还有16bit的short型,32bit的int型。另外,对于位数大于8位的处理器,例如16位或者32位的处理器,由于寄存器宽度大于一个字节,那么必然存在着一个如果将多个字节安排的问题。因此就导致了大端存储模式和小端存储模式。
例如一个16bit的short型x,在内存中的地址为0x0010,x的值为0x1122,那么0x11为高字节,0x22为低字节。
对于大端模式,就将0x11放在低地址中,即0x0010中,0x22放在高地址中,即0x0011中。小端模式,刚好相反。
字节序
在这里再插入一个知识点 字节序:是指CPU对内存中的数据以字节为单位进行存取的顺序,内存是有高低地址之分的,而每个数据的二进制又有高低位之分。
主机的字节序取决于cpu的架构:X86–小端 MIPS–大端
例如 int a=1;小端中存储的是 00 00 00 01 ,大端则是 01 00 00 00
字节序针对的数据:针对存储单元大于一个字节的数据类型:short、int、long、float、double;而char a[10]这种字符数组是不受影响的。
如何判断当前主机的字节序(大小端)呢?
# include <stdio.h>
int main()
{
int a=1;
char *p=&a;
if(*p==1)
printf("当前机器是小端");
else
printf("当前机器是大端");
return;
}
在上面这个程序中,因为a变量占用了四个字节,大端中a变量:0x 00 00 00 01 小端中a变量:0x 01 00 00 00
而*p是char类型 只占用一个字节,将a变量首地址(低地址)处一个字节内的数据赋给p,如果是1就是小端 如果是0就是大端。
浮点数的存储
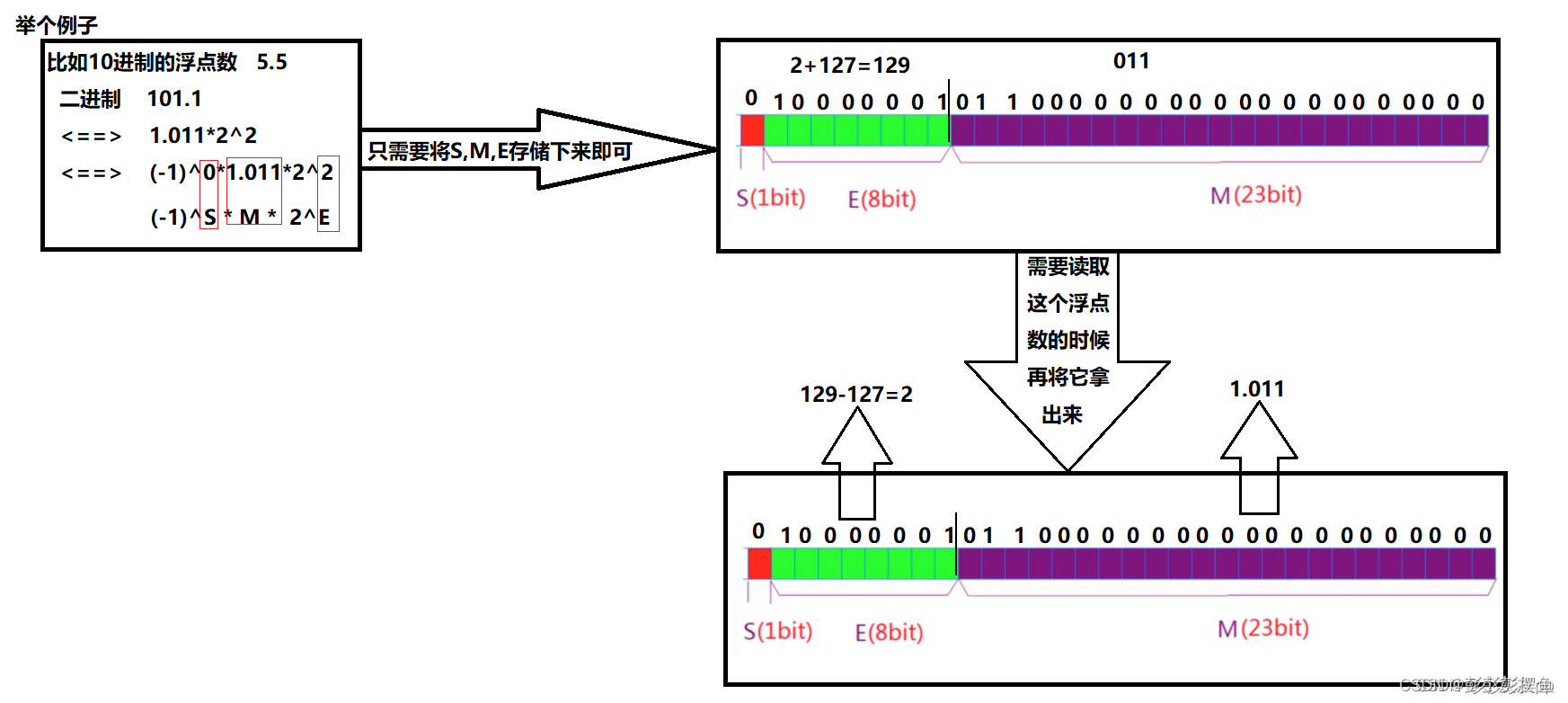
根据国际标准IEEE(电气和电子工程协会) 754,任意一个二进制浮点数V可以表示成下面的形式:
*(-1)^S * M * 2 ^E
*(-1)^S表示符号位,当s=0,V为正数,当s=1,V为负数。
*M表示有效数字,大于等于1,小于2。
*2^E表示指数位
举例来说:十进制的5.0,写成二进制是101.0,相当于1.01×2^2。那么,按照上面的标准,可以得出s=0,M=1.01,E=2。 btw,小数的存储采用二进制用乘二取整法。
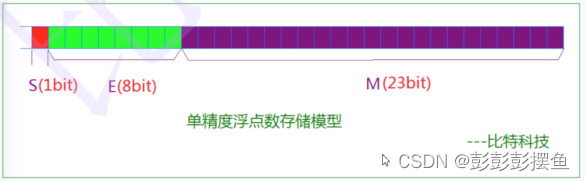
IEEE 754规定:对于32位的浮点数,最高的1位是符号位 接着的8位是指数E,剩下的23位是有效数字M。
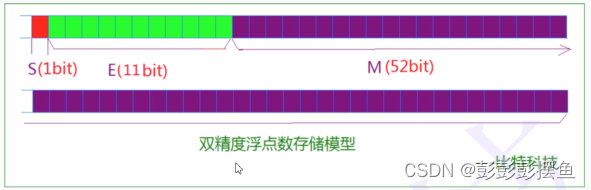
对于64位的浮点数,最高1位是符号位,接着的11位是指数E,剩下的52位为有效数字M。
存储规则:
因为指数位的数值有时候可能是负数,但是指数域是无符号的,无法表示负数,所以采用指数基数:127,真正指数位存储的数据是实际指数值+127。专业的说法叫做使用数字的移码-1; 移码:正数的移码就是符号位取反
因为浮点存储在进行浮点移动的时候,总会移动到第一个1的后边,因此所有的数字表示都是1.xxxxxxx
采用这种方式之后,因为尾数部分,第一个比特位总是存储1,如果把这个1忽略掉,采用这种规则,用的时候再加上,这个1就不用存储了,可以节省一个比特位。
举个栗子:
再举两个栗子:
-3.125 —>-11.001
S:1
E:1+127=128
M:1.1001
所以存储是:
1 10000000 10010000 00000000 0000000 即 11000000 01001000 00000000 00000000 —>c0 48 00 00
0.125—>0.001
S: 0
E: -3+127=124
M: 1
0 01111100 00000000 00000000 0000000 即00111110 00000000 00000000 00000000 —>3e 00 00 00
两种特殊情况:
E为全0:这时真实指数值是1-127=-126,M表示真实值,通常表示正负0
E为全1:这时候真实指数值是255-127=128,M为全0,表示正负无穷大。
上边是32位的存储,对于64位存储思想是一样的,只是各个区域的比特位数不同。64位下指数位E占12个比特位,指数基数为1023。
总结
以上就是今天要讲的内容,本文介绍了数据在内存中的存储方式以及存储规则,个人认为比较重要的就是大小端的部分以及浮点数的存储。
希望看到的老铁们多多支持,纯手敲了一下午(´•ω•̥`)。


















 2564
2564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











