



设计一个支持 push,pop,top 操作,并能在常数时间内检索到最小元素的栈。
push(x) – 将元素 x 推入栈中。
pop() – 删除栈顶的元素。
top() – 获取栈顶元素。
getMin() – 检索栈中的最小元素。
示例:
MinStack minStack = new MinStack();
minStack.push(-2);
minStack.push(0);
minStack.push(-3);
minStack.getMin(); --> 返回 -3.
minStack.pop();
minStack.top(); --> 返回 0.
minStack.getMin(); --> 返回 -2.
https://leetcode-cn.com/problems/min-stack/description/
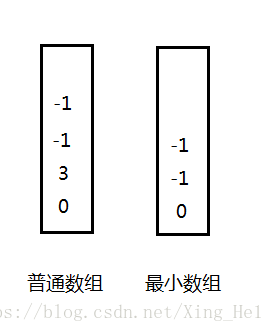
用两个数组实现:
一个普通数组,所有数据都入;
另一个最小数组,为空时入一个数据,之后每次入数据之前先比较所入数据不大于数组,入数据,否则,不入数据
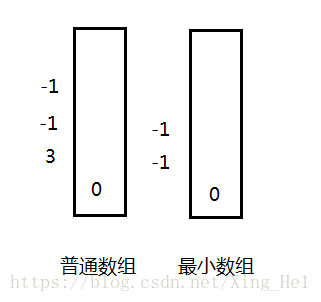
出数据时所出数据和最小数组相等的话,出数据,否则不出
入数据
出数据
实现
typedef struct {
//普通数组
int *pst;
int stTop;
//最小数组
int *pminST;
int minSTTop;
} MinStack;
/** initialize your data structure here. */
MinStack* minStackCreate(int maxSize) {
MinStack *obj =(MinStack *)malloc(sizeof(MinStack));
obj->pst = (int *)malloc(sizeof(int)*maxSize);
obj->stTop = 0;
obj->pminST = (int *)malloc(sizeof(int)*maxSize);
obj->minSTTop = 0;
return obj;
}
void minStackPush(MinStack* obj, int x) {
assert(obj);
int *pst = obj->pst;
int *pminST = obj->pminST;
pst[obj->stTop++] = x;
//如果是第一个元素或者输入的元素小于等于最小数组--入数据
if(obj->minSTTop == 0
|| x <= pminST[obj->minSTTop-1])
{
pminST[obj->minSTTop++] = x;
}
}
void minStackPop(MinStack* obj) {
assert(obj);
int *pst = obj->pst;
int *pminst = obj->pminST;
//如果出栈时出的元素等于最小数组--出数据
if(pst[obj->stTop-1] == pminst[obj->minSTTop-1])
{
obj->minSTTop--;
}
obj->stTop--;
}
int minStackTop(MinStack* obj) {
assert(obj);
return obj->pst[obj->stTop-1];
}
int minStackGetMin(MinStack* obj) {
assert(obj);
return obj->pminST[obj->minSTTop-1];
}
void minStackFree(MinStack* obj) {
assert(obj);
free(obj->pst);
free(obj->pminST);
free(obj);
obj = NULL;
}
/**
* Your MinStack struct will be instantiated and called as such:
* struct MinStack* obj = minStackCreate(maxSize);
* minStackPush(obj, x);
* minStackPop(obj);
* int param_3 = minStackTop(obj);
* int param_4 = minStackGetMin(obj);
* minStackFree(obj);
*/

















 890
890

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









