




 本文介绍如何使用LD3320语音模块控制电机转向,通过修改特定代码实现向左、向右及停车功能。后续计划实现语音模块与单片机的串行通信,进一步通过2.4G模块远程控制小车方向。
本文介绍如何使用LD3320语音模块控制电机转向,通过修改特定代码实现向左、向右及停车功能。后续计划实现语音模块与单片机的串行通信,进一步通过2.4G模块远程控制小车方向。
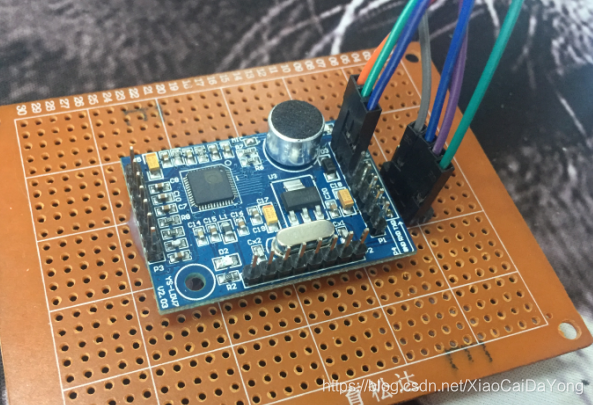
·通过语音模块(LD3320)控制电机转动方向,其实这个语音模块的代码网上很全,淘宝会提供一套完整的开发代码,我们使用者其实不需要关注它的具体实现过程,只需要掌握如何去修改代码完成功能即可。
修改的部分代码如下:
/******wantin modify 2018.12.4*********/
sbit EN = P1^0; // 电机输入输出1,2
sbit IN1 = P1^1; // 输入1
sbit IN2 = P1^2; // 输入2
void User_handle(uint8 dat)
{
//UARTSendByte(dat);//串口识别码(十六进制)
switch(dat) /*对结果执行相关操作,客户修改*/
{
case CODE_DMCS: /*命令“测试”*/
PrintCom("“代码测试”命令识别成功\r\n"); /*text.....*/
break;
case CODE_KFBYZ: /*命令“全开”*/
PrintCom("“开发板验证”命令识别成功\r\n"); /*text.....*/
break;
case CODE_XZ: /*命令“复位”*/
PrintCom("“向左”命令识别成功\r\n"); /*text.....*/
IN1=1; // add wt
IN2=0; // add wt
break; // add wt
case CODE_XY: /*命令“复位”*/
PrintCom("“向右”命令识别成功\r\n"); /*text.....*/
IN1=0; // add wt
IN2=1; // add wt
break;
case CODE_QJ: /*命令“复位”*/
PrintCom("“前进”命令识别成功\r\n"); /*text.....*/
break;
case CODE_HT: /*命令“复位”*/
PrintCom("“后退”命令识别成功\r\n"); /*text.....*/
break;
case CODE_TC: /*命令“复位”*/
PrintCom("“停车”命令识别成功\r\n"); /*text.....*/
IN1=0; // add wt
IN2=0; // add wt
break;
default:PrintCom("请重新识别发口令\r\n"); /*text.....*/break;
}
}
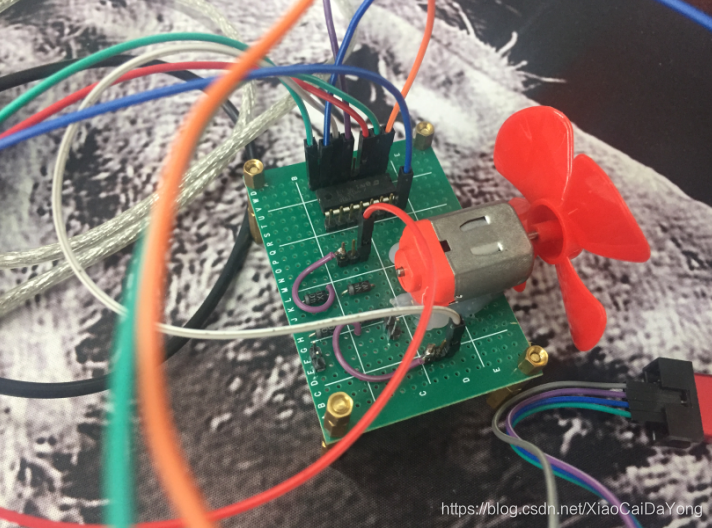
说出 向左,向右或停车,电机则会完成相应功能,下面的博客我将准备实现语音模块与单片机进行串行通信,再通过2.4G模块进行远程控制小车方向。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











