



1. cv2.namewindow()
在cv2.imshow()之前,加上cv2.namewindow()函数后,所打开的窗口就可以改变大小。
cv2.namedWindow(‘窗口标题’,默认参数)
| 默认参数 | 语句意义 |
|---|---|
| cv2.WINDOW_NORMAL | 窗口大小可改变 |
| cv2.WINDOW_AUTOSIZE | 窗口大小不可 |
| cv2.WINDOW_FREERATIO | 自适应比例 |
| cv2.WINDOW_KEEPRATIO | 保持比例 |
| cv2.WINDOW_GUI_一致EXPANDED | 显示色彩变成暗色 |
注意:
namewindow的窗口标题要与imshow
2. cv2.resize()
原博文 Python-OpenCV之图片缩放
OpenCV函数原型:
cv2.resize(InputArray src, OutputArray dst, Size, fx, fy, interpolation)
参数详解
| InputArray src | 输入图片 |
|---|---|
| OutputArray dst | 输出图片 |
| OutputArray dst | 输出图片 |
| Size | 输出图片尺寸 |
| fx, fy | 沿x轴,y轴的缩放系数 |
| interpolation | 插入方式 |
interpolation 选项所用的插值方法:
| INTER_NEAREST | 最近邻插值 |
|---|---|
| INTER_LINEAR | 双线性插值(默认设置,适合放大图片) |
| INTER_AREA | 使用像素区域关系进行重采样(适合缩小图片) |
| INTER_CUBIC | 4x4像素邻域的双三次插值 |
| INTER_LANCZOS4 | 8x8像素邻域的Lanczos插值 |
注意
- 输出尺寸格式为(宽,高)
- 默认的插值方法为:双线性插值
代码演示
import cv2 as cv
# 读入原图片
img = cv.imread('test.jpg')
# 打印出图片尺寸
print(img.shape)
# 将图片高和宽分别赋值给x,y
x, y = img.shape[0:2]
# 显示原图
cv.imshow('OriginalPicture', img)
# 缩放到原来的二分之一,输出尺寸格式为(宽,高)
img_test1 = cv.resize(img, (int(y / 2), int(x / 2)))
cv.imshow('resize0', img_test1)
cv.waitKey()
# 最近邻插值法缩放
# 缩放到原来的四分之一
img_test2 = cv.resize(img, (0, 0), fx=0.25, fy=0.25, interpolation=cv.INTER_NEAREST)
cv.imshow('resize1', img_test2)
cv.waitKey()
#设定目标尺寸
img_test3 = cv2.resize(img, (150, 150), interpolation=cv2.INTER_CUBIC)
cv.imshow('resize2', img_test3)
cv.waitKey()
cv.destroyAllWindows()
3. cv2.threshold(阀值灰度)
cv2.threshold(src, thresh, maxval, type[, dst]) → retval, dst
参数说明
src:源图像,可以为8位的灰度图,也可以为32位的彩色图像。(两者由区别)
thresh:阈值
maxval:dst图像中最大值
type:阈值类型,可以具体类型如下: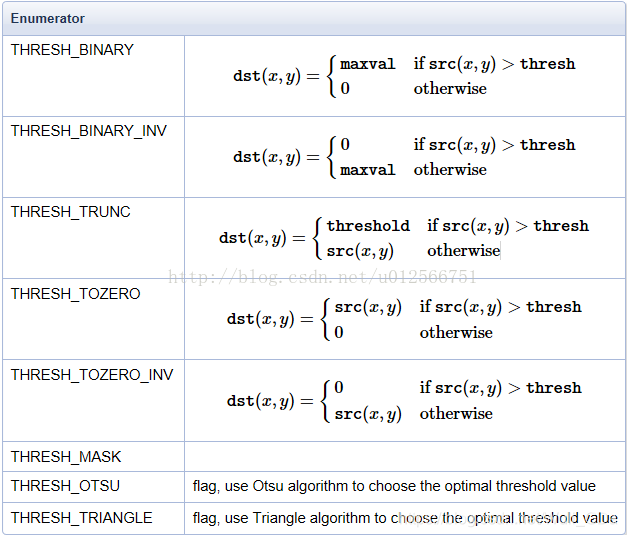
- cv2.findContours()查找轮廓
OpenCV-Python接口中使用cv2.findContours()函数来查找检测物体的轮廓。需要注意的是cv2.findContours()函数接受的参数为二值图,即黑白的(不是灰度图),所以读取的图像要先转成灰度的,再转成二值图。
函数的原型为:
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
参数
-
image:寻找轮廓的图像;
-
mode
表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口):
cv2.RETR_EXTERNAL表示只检测外轮廓
cv2.RETR_LIST检测的轮廓不建立等级关系
cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
cv2.RETR_TREE建立一个等级树结构的轮廓。 -
method:为轮廓的近似办法
cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1
cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
cv2.CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS使用teh-Chinl chain 近似算法
返回值
opencv2返回两个值:contours,hierarchy,
opencv3会返回三个值,分别是img, countours, hierarchy
cv2.findContours()函数返回两个值,一个是轮廓本身,还有一个是每条轮廓对应的属性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









