



大家好,我是老叶,一家软件开发及商业模式设计公司的负责人,坚持给大家分享不一样的商业秘密。
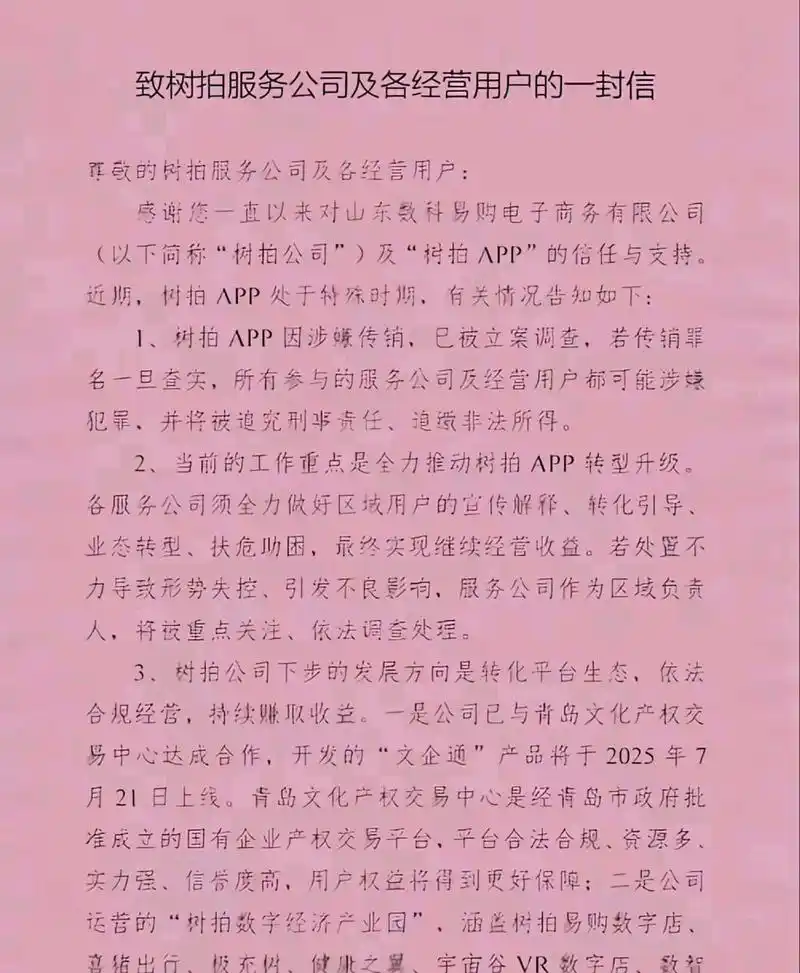
在市场经济的浪潮中,商业模式创新从未停止。近期,树拍易购等平台出现经营问题,给行业带来了重要警示。其采用的"抢拍+寄售"模式因脱离实体经济本质,过度依赖资金循环,最终难以持续。这个案例提醒我们:任何商业模式的创新,都必须建立在为实体经济创造真实价值的基础上。
值得欣慰的是,市场上始终有一批坚守正道、稳健创新的企业在默默耕耘。它们用实践证明,只有扎根实体经济、坚持合规经营、创造真实价值的模式,才能经得起市场的考验,获得长久的发展。
经过市场验证的成功模式,往往具备以下特征:
首先,它们始终与实体经济深度融合。无论是消费积分还是红包激励,其价值来源都是真实的商业让利和消费场景,而不是虚拟的资金循环。某社区超市通过创新营销方式,将复购率从30%提升至65%,靠的是真实的消费体验和价值创造。
其次,这些模式都建立了完善的合规体系。通过第三方资金监管、合理的分润机制、依法纳税等举措,确保商业活动在法律法规框架内健康运行。这种合规性不仅保障了各方权益,也为长期发展奠定了坚实基础。
再次,它们注重多方价值共赢。可靠的商业模式不是零和游戏,而是通过创新机制,让消费者得实惠、商家获客流、平台促发展,形成良性循环的商业生态。
当前市场上,一些创新模式展现出良好的发展态势:
有的模式注重长期客户价值培育,通过消费积分等机制,帮助商家建立稳定的客户关系。这种模式适合希望打造品牌忠诚度、追求长期发展的企业。
另一些模式侧重即时激励和引流,通过便捷的数字化工具,为商家提供轻量级的营销解决方案。这种方式操作简单、见效快,适合需要快速提升客流量的场景。
还有模式致力于构建商业生态,通过异业联盟等方式,实现资源共享和客流互通,帮助商家突破单打独斗的局限,获得更大的发展空间。
面对多元化的商业模式选择,商家需要保持清醒的头脑:
要选择与自身业务特点相匹配的模式。不同的行业特性、客群特征、发展阶段,适合不同的商业模式。商家应该根据自身实际情况,选择最合适的发展路径。
要重点关注模式的可持续性。考察模式是否扎根实体经济、是否有清晰的盈利模式、是否符合监管要求,这些都是判断模式可持续性的重要指标。
要重视合作伙伴的信誉和实力。选择那些有成功案例、运营规范、口碑良好的平台合作,可以大大降低经营风险。

商业创新是推动经济发展的重要力量,但创新不能偏离本质。最好的商业模式,是那些能够为实体经济赋能、为消费者创造价值、为商家带来增长的正道模式。
我们相信,只要坚守商业本质,坚持正道经营,无论市场如何变化,商家都能找到属于自己的发展之路,在数字经济的浪潮中乘风破浪,实现可持续的发展。
让我们共同期待,更多扎根实体经济、创造真实价值的创新模式涌现出来,为商业世界注入更多正能量,共同推动经济高质量发展。
认同且支持老叶的话,扣波“666”,感谢

















 1570
1570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









