






目录
本指南介绍如何在 Ubuntu 上设置 W55RP20 开发环境、构建示例和验证功能。
1 组件
1.1 硬件组件
2 项目描述
适用于 Ubuntu 的 Raspberry Pi Pico 设置指南和示例。
本指南介绍如何在 Ubuntu 上设置 W55RP20 开发环境、构建示例和验证功能。
3 开发环境设置
3.1 更新 Ubuntu 软件包
首先,确保您的系统软件包是最新的:
$apt-get install
$apt-get upgrade 3.2 安装所需的软件包
安装用于构建和运行示例的基本工具:
$sudo apt-get install wget cmake python3 git tar
$sudo apt-get install gcc-arm-none-eabi libnewlib-arm-none-eabi build-essential
$sudo apt-get install g++ libstdc++-arm-none-eabi-newlib 3.3 下载 Raspberry Pi Pico 设置脚本
下载 Raspberry Pi 提供的设置脚本以简化设置过程:
$mkdir setupScript
$cd setupScript
$wget https://raw.githubusercontent.com/raspberrypi/pico-setup/master/pico_setup.sh 授予脚本执行权限并运行它:
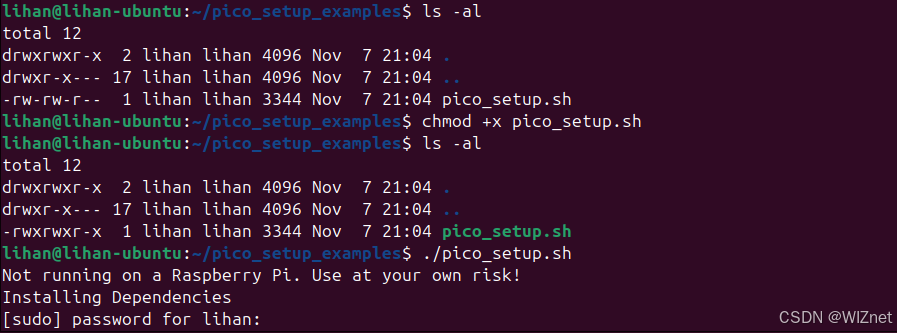
$ ls -al
$ chmod +x pico_setup.sh
$ ls -al
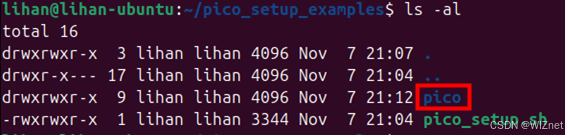
$ ./pico_setup.sh 注意:该脚本可能需要 10 到 20 分钟才能完成,并且可能需要管理员权限。
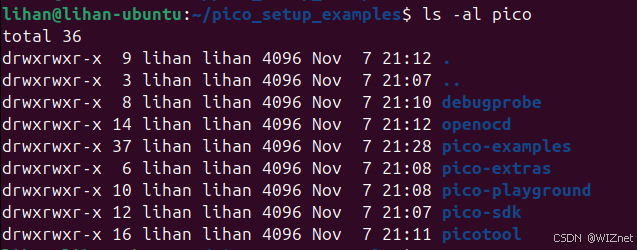
运行脚本后,会创建一个名为“pico”的目录,其中包含 SDK 和示例代码。
4 构建和测试 Blink 示例
导航到 examples 目录,创建一个构建目录,然后使用 CMake 配置构建环境:
$ cd pico/pico-examples/
$ mkdir build
$ cd build
$ export PICO_SDK_PATH=/../../pico-sdk
$ cmake .. Build the blink example: 构建 blink 示例:
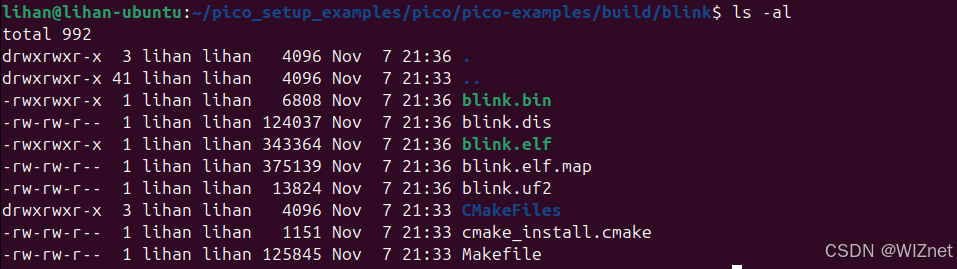
$ cd blink
$ make -j4 如果成功,您将在 build 输出目录中找到 .bin 和 .uf2 文件。
4.1 W55RP20 设置和示例
4.1.1 克隆 WIZnet 存储库
克隆 WIZnet-PICO-C 存储库以进行W55RP20并初始化其子模块:
$ mkdir wiznet
$ cd wiznet
$ git clone https://github.com/WIZnet-ioNIC/WIZnet-PICO-C.git
$ cd WIZnet-PICO-c
$ git submodule update –init
$ cd libraries/pico-sdk
$ git submodule update –init
$ cd ../
$ cd mbedtls
$ git submodule update –init 4.1.2 修改配置文件
编辑 CMakeLists.txt 以适合您的目标 EVB 板:
$ vi CMakeList.txt 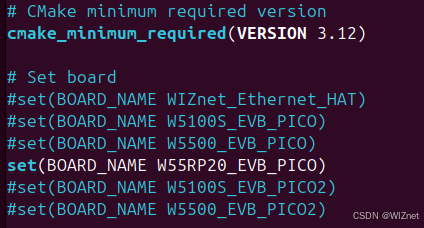
根据需要编辑 example/loopback 目录中的 w5x00_loopback.c:
$ cd example/loopback
$ vi w5x00_loopback.c 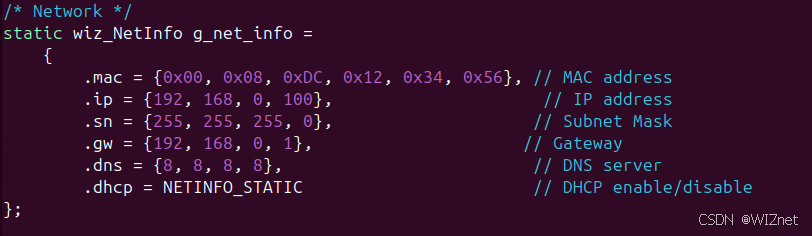
4.2 构建 W55RP20 环回示例
创建一个构建目录并继续构建:
$ cd ../../
$ mkdir build
$ cd build
$ cmake ..
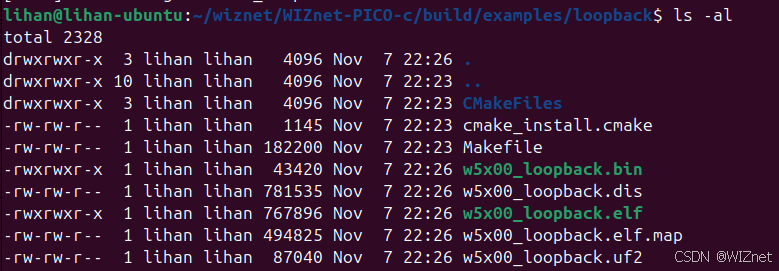
$ cd example/loopback
$ make -j4 如果成功,将在 build 目录中生成 .bin 和 .uf2 文件。
4.3 将 UF2 文件上传到 Pico Flash
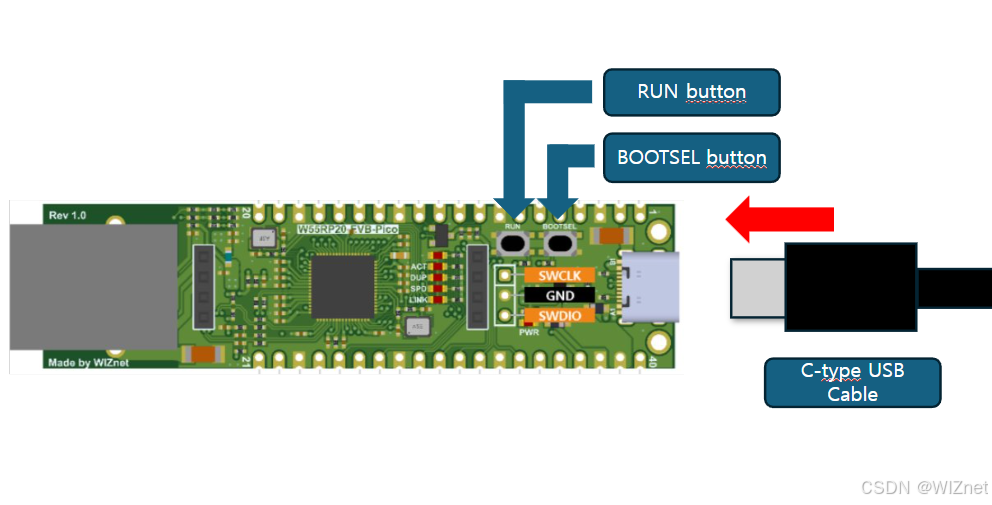
4.3.1 在 W55RP20 上进入引导模式
-
使用 USB Type-C 数据线将 W55RP20 连接到 Ubuntu PC。
-
按住 BOOTSEL 按钮。
-
按住 BOOTSEL 的同时按下并松开 RUN 按钮。
-
松开 BOOTSEL 按钮。
4.3.2 烧录 UF2 文件
验证 W55RP20 是否已连接到 PC:
$ lsusb
$ df Mount the flash storage: 挂载闪存:
$ mkdir ~/picoMount
$ sudo mount </your/device> ~/picoMount 复制 UF2 文件:
$ cp w5x00_loopback.uf2 ~/picoMount Unmount the flash: 卸载闪存:
$ sudo umount ~/picoMount 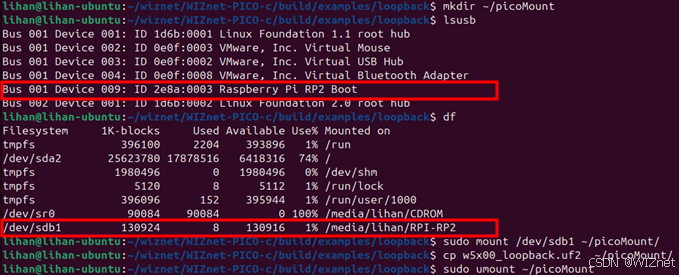
4.4 环回测试
使用环回示例验证功能
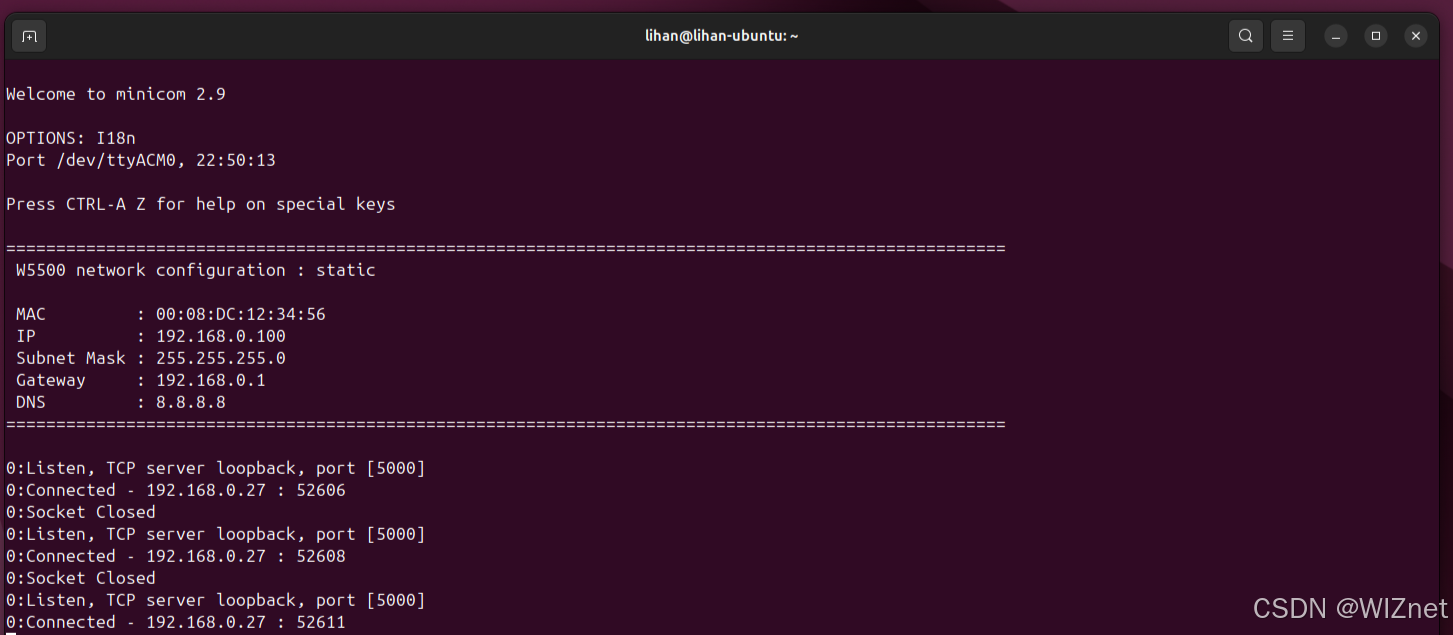
Server: W55RP20 acting as the loopback server.
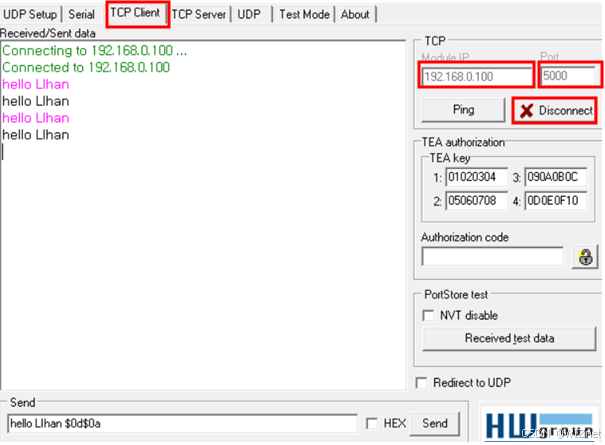
Client: A Windows PC acting as the loopback client.来自 W55RP20 的调试消息,充当环回服务器,在 Ubuntu PC 上使用 minicom 进行检查。 Windows PC 作为环回客户端的功能已使用 Hercules 进行了验证。
来自 W55RP20 的调试消息,通过 minicom 验证:
来自 loopback 客户端的消息,使用 Hercules 进行了测试:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









