




关注gongzhonghao【学术鲸】,解锁更多SCI相关资讯!
近年来,强化学习领域的研究趋势从单一的算法优化转向多领域融合与创新。尽管强化学习不再像前几年那样“内卷”,但从顶级会议如CVPR等的研究成果来看,相关研究依然活跃,只是风格和方向发生了显著变化。
如今的研究热点包括强化学习与人类反馈(RLHF)、样本效率提升、多智能体强化学习(MARL)等方向,尤其是通用强化学习,已在《Nature》正刊发表,显示出其作为未来研究大趋势的潜力。
本文将对三篇最新的强化学习相关论文进行拆解,探讨其在自动驾驶、模拟到现实转移和多智能体交通信号控制中的创新应用。
Diverse and Adaptive Behavior Curriculum for Autonomous Driving: A Student-Teacher Framework with Multi-Agent RL
方法:
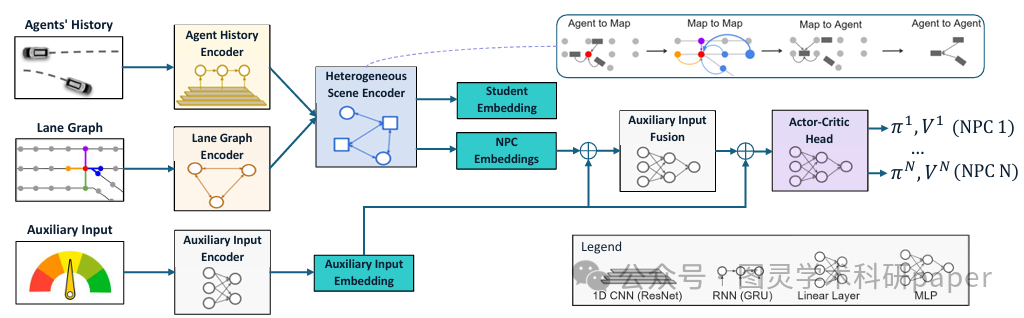
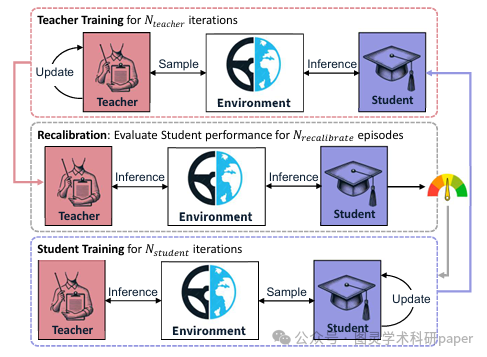
作者构建了一个学生-教师双循环框架:教师是一个全观测的图神经网络策略,它以当前路况、学生表现和难度参数λ为输入,为每个NPC独立输出动作,奖励由利己驾驶指标与学生回报共同加权;学生则采用带RGB与激光雷达输入的TransFuser-PPO策略,在教师生成的交通流中学习驾驶。整个流程按“教师训练-学生重标定-学生训练”三步交替执行,根据学生成功阈值自动升降λ,从而在无人工干预的情况下生成覆盖从稀疏礼让到密集对抗的完整行为课程。
创新点:
-
首次将图式多智能体强化学习(MARL)引入教师角色,使其能在连续难度轴上实时生成多样化NPC行为而非只造极端场景。
-
提出以λ为难度旋钮的自适应奖励机制,动态平衡NPC的利己驾驶与对学生驾驶表现的响应,实现可解释的难度递增。
-
设计交替式师生共训算法,在训练过程中仅更新一方而冻结另一方,避免非平稳环境带来的震荡,实现端到端自动课程编排。
论文链接:
https://arxiv.org/pdf/2507.19146
关注gongzhonghao【学术鲸】,获取强化学习最新选题和idea~
PPAAS: PVT and Pareto Aware Analog Sizing via Goal-conditioned Reinforcement Learning
方法:
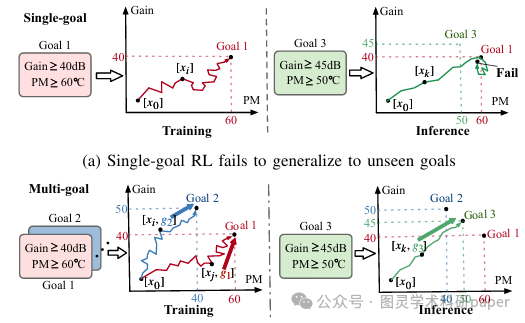
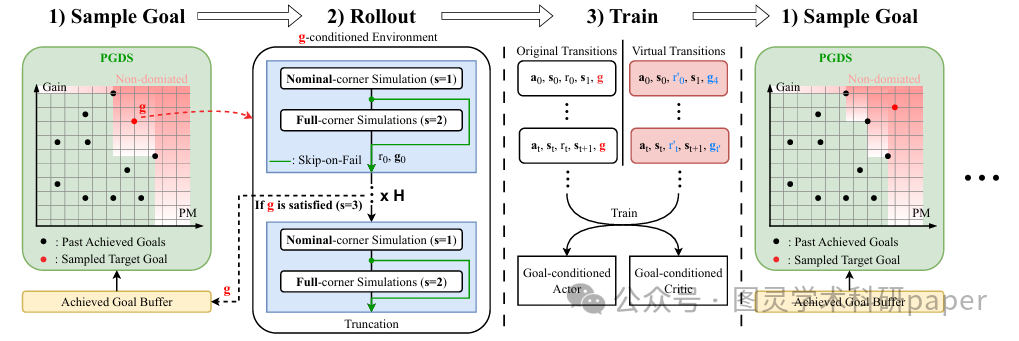
文章首先构建了一个基于目标条件强化学习(GCRL)的框架,通过在每个训练周期中动态调整目标,使模型能够适应多种设计规格。接着,通过PDGS策略从Pareto前沿选择目标,结合CHER为重标记目标分配保守奖励,从而在保证训练稳定性的前提下提高样本效率。最后,通过SoF策略在名义角仿真失败时跳过全角仿真,减少了不必要的计算开销,同时通过分层奖励机制确保了在PVT变化下的鲁棒性。
创新点:
-
提出了Pareto主导目标采样(Pareto-Dominant Goal Sampling, PDGS)策略,通过从已达成目标的Pareto前沿中选择足够困难的目标来构建自动课程,从而提高样本效率。
-
设计了PVT感知的分层奖励机制,结合保守后见之明经验回放(Conservative Hindsight Experience Replay, CHER),通过为重标记目标分配保守的虚拟奖励来稳定训练并加速收敛。
-
引入了跳过失败(Skip-on-Fail, SoF)仿真策略,当名义角仿真未能达到目标规格时跳过全角仿真,显著减少了仿真开销。
论文链接:
https://arxiv.org/pdf/2507.17003
关注gongzhonghao【学术鲸】,获取强化学习最新选题和idea
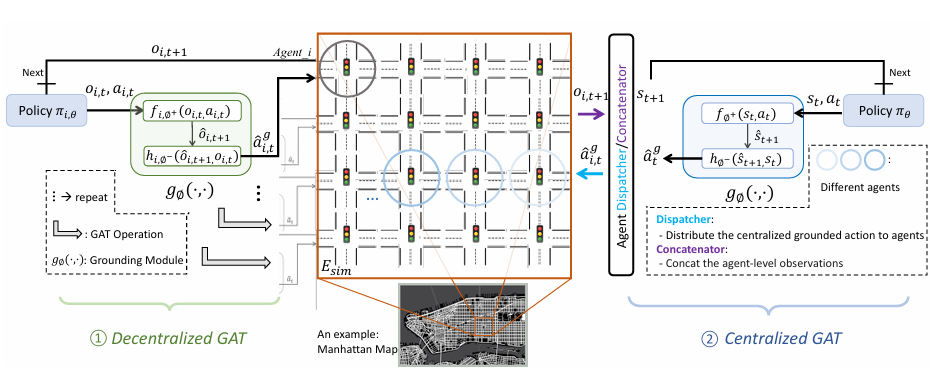
JOINT-LOCAL GROUNDED ACTION TRANSFORMATION FOR SIM-TO-REAL TRANSFER IN MULTI-AGENT TRAFFIC CONTROL
方法:
文章首先将交通信号控制问题建模为一个分散式部分可观测马尔可夫决策过程(Dec-POMDP),每个交叉口作为一个独立智能体进行决策。接着,基于JL-GAT框架,通过扩展分散式GAT方法,将邻近智能体的状态和动作信息整合到每个智能体的GAT模型中,从而在保持分散式架构可扩展性的同时,增强了对智能体间交互的建模能力。最后,通过在不同交通网络和模拟恶劣天气条件下进行的广泛实验,验证了JL-GAT在缩小模拟与现实环境性能差距方面的有效性,并通过消融研究和不确定性量化方法的结合进一步展示了其优势。
创新点:
-
提出了JL-GAT框架,通过结合集中式和分散式接地动作转换(GAT)的优点,既考虑了智能体间的交互,又保持了可扩展性,有效平衡了复杂多智能体系统中的性能与效率。
-
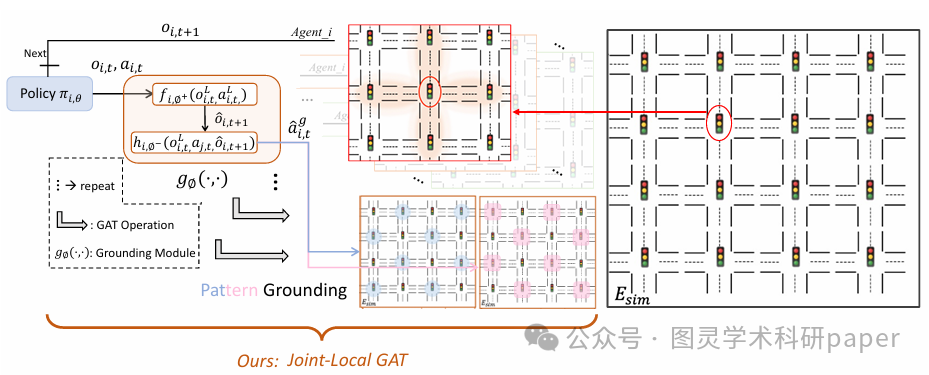
引入了局部联合状态和动作信息,使每个智能体的GAT模型能够利用邻近智能体的信息来增强对环境动态的建模能力,从而更精准地模拟现实世界的交通场景。
-
针对多智能体GAT中出现的级联失效问题,提出了模式接地和概率接地两种解决方案,显著提高了模型的稳定性和灵活性,为复杂交通网络中的sim-to-real转移提供了有力支持。
论文链接:
https://arxiv.org/pdf/2507.15174
► 论文发表难题,一站式解决!
TURING
选题是论文的第一步,非常重要!
但很多学生找到了热门的选题,却卡在代码和写作上!可见论文要录用,选题-idea-代码-写作都缺一不可!
图灵学术论文辅导,汇聚经验丰富的实战派导师团队,针对计算机各类领域提供1v1专业指导,直至论文录用!
关注gongzhonghao【学术鲸】,解锁更多SCI相关资讯!

















 845
845

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









