



雷池配置同步教程
雷池7.x版本新增配置同步功能,可以设置主节点和从节点,可以自动每分钟将主节点的配置同步到从节点,在主节点异常情况下,实现从节点无缝承接。
准备环境
检查主从节点机器的雷池版本,必须保持一致(包括小版本号)
检查主从节点机器的雷池授权,必须保持一致(都为专业版或者都为商业版)
检查主从节点机器的网络通信,必须可以通信
设置主节点
- 指定一台设备为主节点
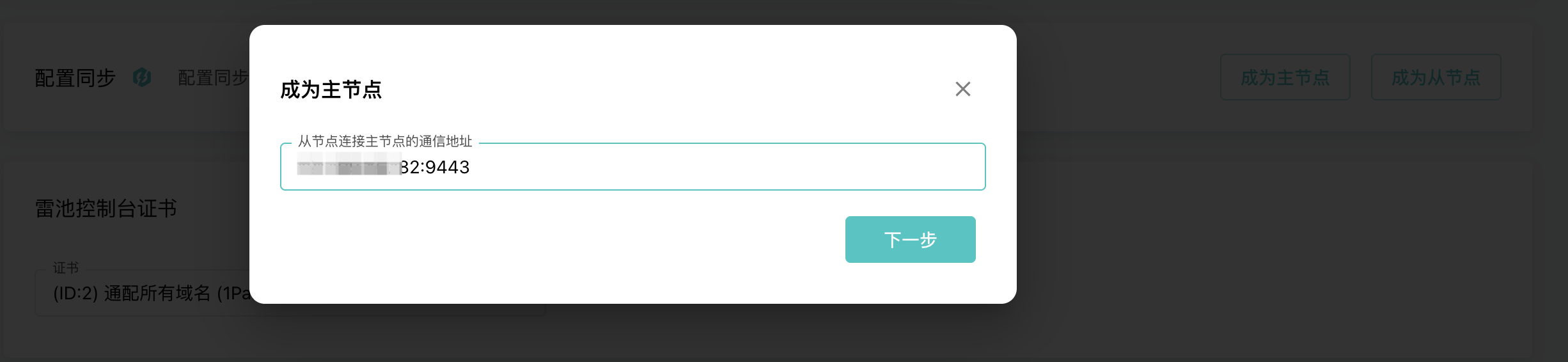
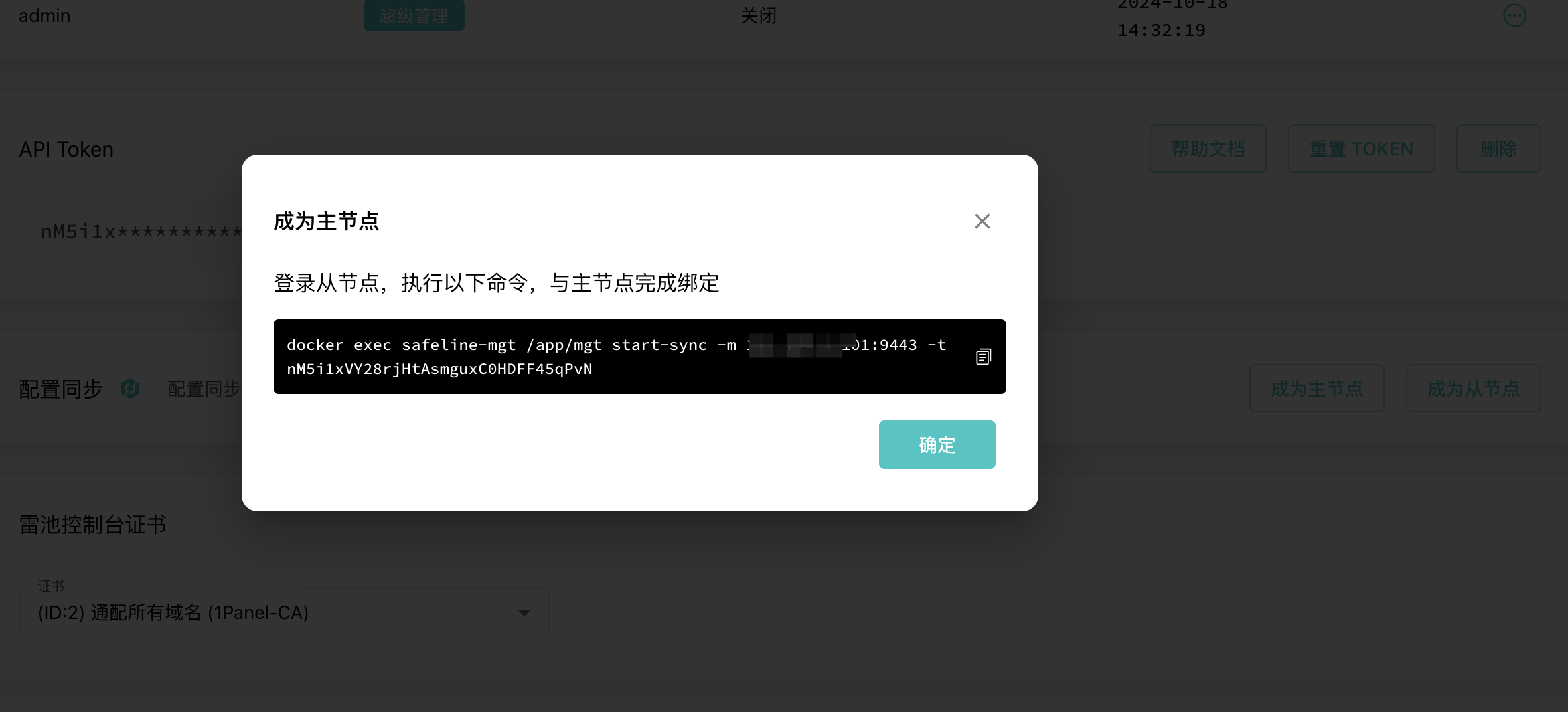
- 查看从节点需要执行的命令,保存,需要去从节点机器执行
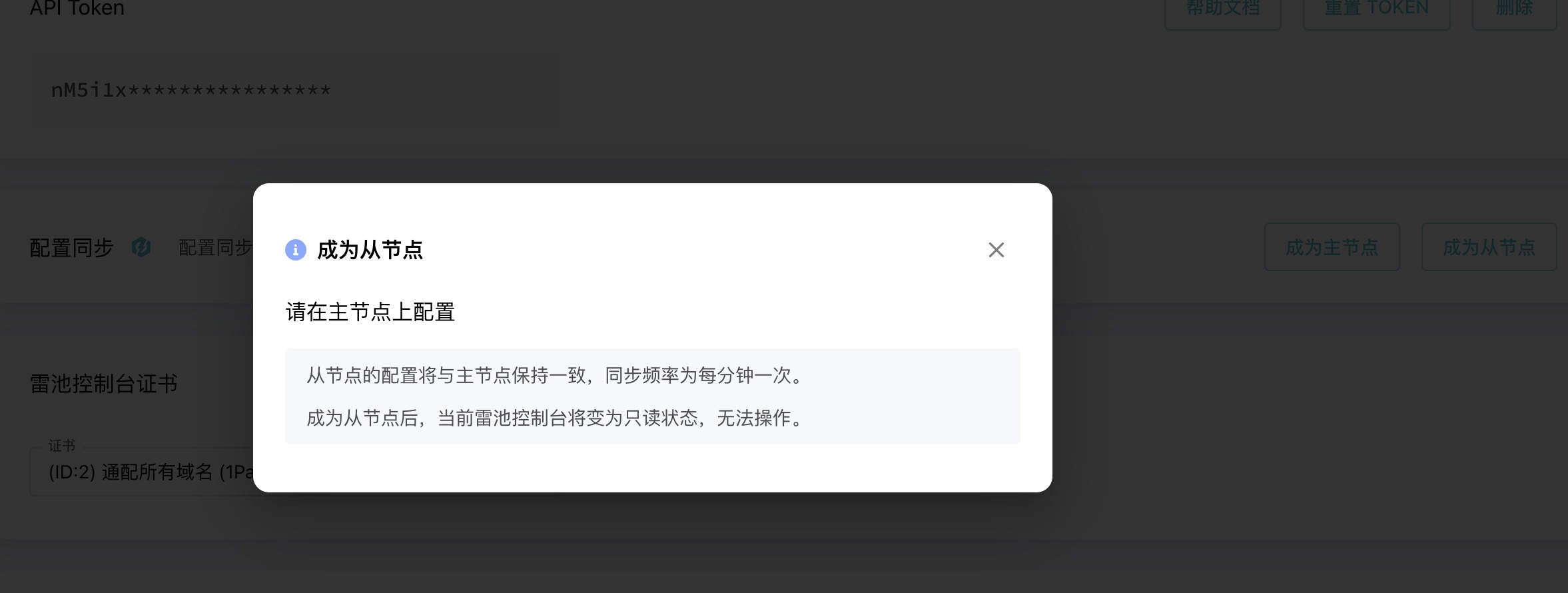
设置从节点
- 指定一台设备为从节点
从节点执行主节点拿到的绑定命令—命令需要从主节点获取,获取方式在上面
执行完成后查看结果,如图执行成功

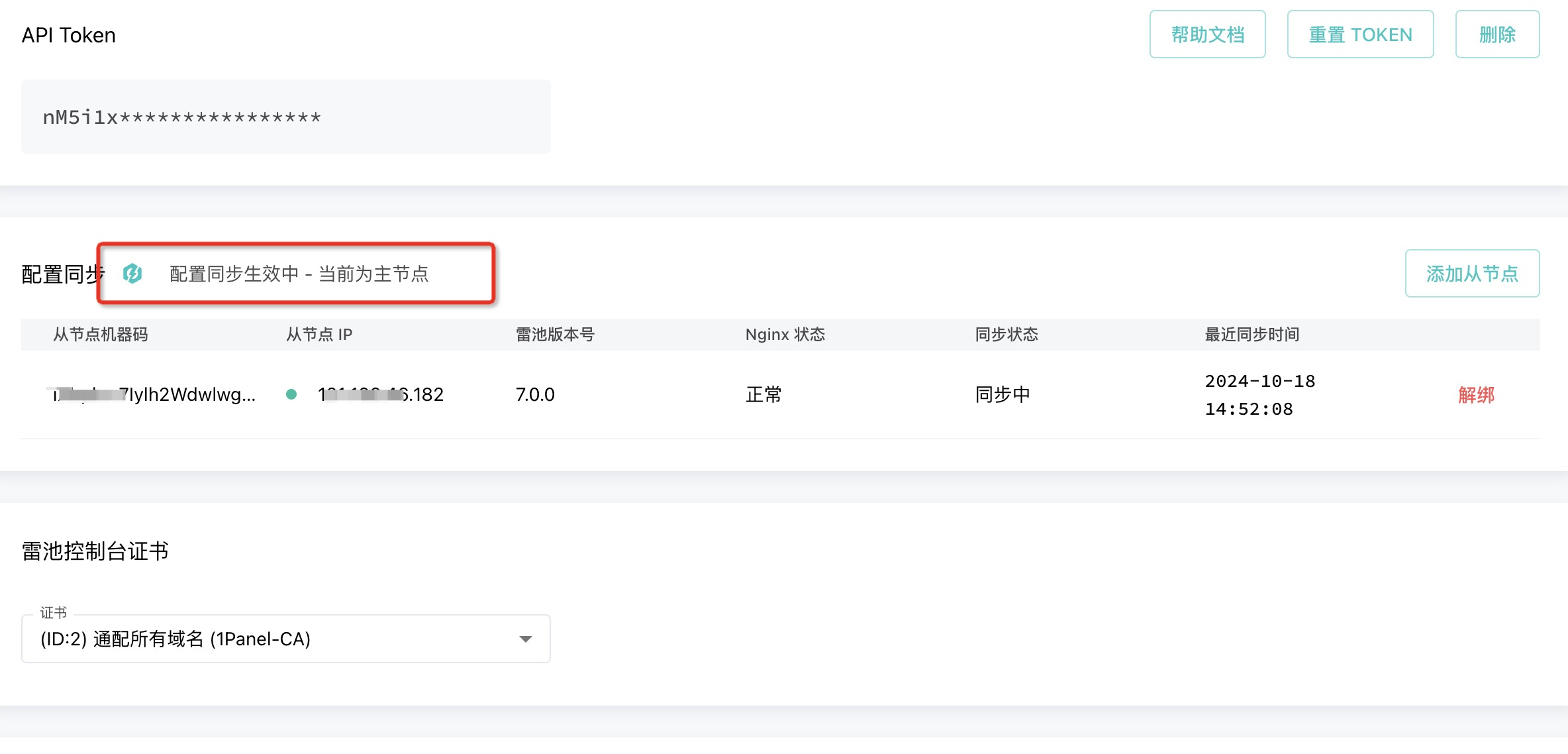
设置成功
- 查看主节点显示
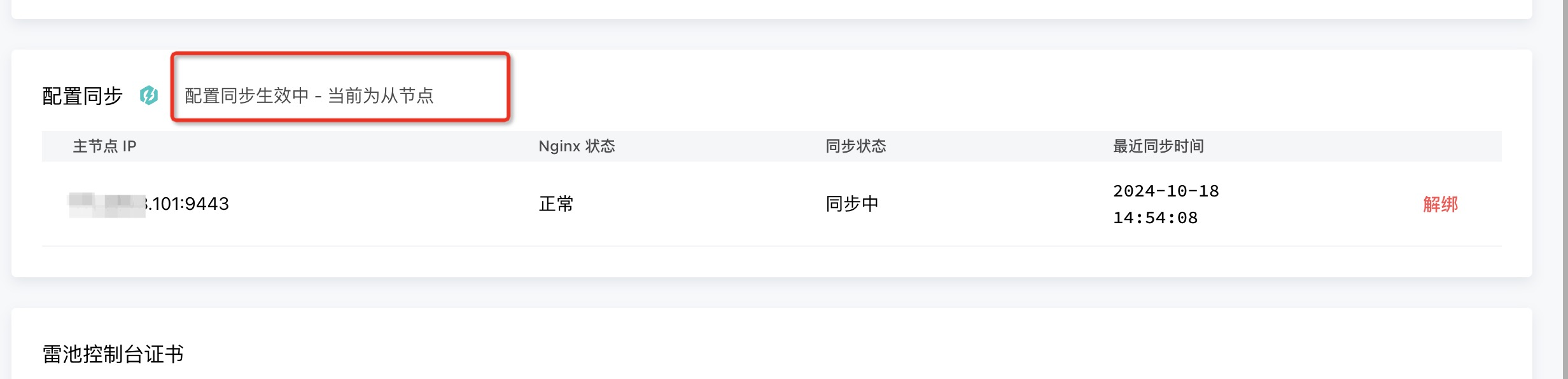
- 查看从节点显示,从节点无法修改配置(默认禁止操作)
- 测试配置同步,可以尝试主节点修改配置,查看从节点是否同步成功
配置同步,日志和统计信息不会同步
解绑配置同步
点击右边的解绑按钮接触配置同步
其他问题
- 主设备可以有多少个从设备? 不限制从设备数量

















 1312
1312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









