



边坡排水沟作为边坡防护工程的核心组成部分,承担着引导地表水、降低地下水位、维护结构稳定等关键任务。然而,随着时间推移,排水沟易因杂草滋生、泥土堆积或杂物堵塞导致功能失效,进而引发边坡失稳、水土流失甚至灾害性事故。传统巡检运维模式依赖人工定期排查,不仅成本高昂、效率低下,且难以覆盖复杂地形或偏远区域,导致隐患发现滞后、处置不及时。
在AI技术快速发展的背景下,无人机与智能化算法的结合为边坡排水沟巡检运维提供了全新解决方案。通过无人机的高空视角与AI的精准识别能力,可实现全天候、高效率、低成本的自动化巡检,推动传统工程运维向“智能感知-实时预警-精准处置”的闭环管理模式升级。
一、传统巡检模式的痛点:人力依赖与效率瓶颈
1. 人力成本高,覆盖范围有限
传统巡检需专业团队定期携带设备徒步或驾车巡查,尤其在山区、水库等复杂地形中,人力投入大、耗时长,且部分区域难以抵达。例如,某山区公路边坡排水沟巡检需5人团队耗时3天完成,人力成本占运维总支出的60%以上。
2. 巡检周期长,隐患发现滞后
人工巡检通常按固定周期进行,难以实时监测排水沟状态。若遇暴雨等极端天气,堵塞可能迅速加剧,但人工无法及时响应,导致小问题演变为大灾害。据统计,因排水沟堵塞引发的边坡事故中,超70%与巡检滞后直接相关。
3. 数据记录主观,分析效率低下
人工巡检依赖纸质记录或简单拍照,数据碎片化且难以量化分析。例如,杂草覆盖面积、堵塞物类型等关键指标需后期人工整理,误差率高,无法为长期维护提供科学依据。
二、AI+无人机:智能化巡检的技术路径
1. 无人机:突破地形限制的“空中巡检员”
无人机搭载高清摄像头、多光谱传感器及激光雷达(LiDAR),可快速覆盖大面积区域,尤其适合人工难以到达的陡坡、深谷或水库边坡。例如,单架无人机单日可巡检20公里排水沟,效率是人工的10倍以上。
- 高清成像:捕捉排水沟细节,识别杂草、泥土、树枝等堵塞物;
- 多光谱分析:通过植被指数(NDVI)区分健康植被与需清理的杂草;
- 三维建模:利用LiDAR生成排水沟三维模型,量化评估堵塞程度与结构变形。
2. AI算法:从“被动记录”到“主动预警”
通过深度学习训练,AI模型可对无人机采集的图像与数据进行实时分析,实现以下功能:
- 堵塞识别:基于目标检测算法(如YOLO系列)精准定位堵塞位置,分类识别堵塞物类型(如泥土、塑料、植被);
- 严重程度评估:通过图像分割技术计算堵塞面积占比,结合流量模拟算法预测对排水功能的影响;
- 趋势预测:结合历史数据与气象信息,预测堵塞风险区域,提前调度资源。
3. 闭环管理:从“发现”到“处置”的全链条优化
AI系统与运维平台联动,形成“巡检-预警-派单-处理-反馈”的闭环:
- 实时预警:无人机巡检画面实时传输至云端,AI模型5秒内完成分析,若检测到堵塞则自动触发预警;
- 智能派单:系统根据堵塞位置、严重程度及团队空闲状态,自动分配清理任务至最近运维人员;
- 效果验证:处理完成后,无人机复检并上传结果,AI对比前后数据确认处置效果,生成维护报告。
三、智能化巡检的应用价值:降本增效与风险防控
1. 成本显著降低,资源高效配置
某水库边坡项目实践显示,采用AI+无人机模式后,人力成本降低40%,巡检周期从每月1次缩短至每周1次,且覆盖范围扩大3倍。同时,精准派单使运维团队效率提升60%,避免“过度维护”或“维护不足”。
2. 风险主动防控,灾害提前化解
在2023年某暴雨灾害中,AI系统提前48小时预警某公路边坡排水沟堵塞风险,运维团队及时清理,避免了可能引发的滑坡事故。据测算,智能化巡检可使边坡灾害发生率降低30%以上。
3. 数据驱动决策,优化长期维护
AI系统积累的海量数据可分析排水沟堵塞规律(如季节性杂草生长周期、特定区域易堆积物类型),为设计优化(如调整排水沟坡度、增设过滤装置)提供依据,实现从“被动修复”到“主动预防”的转变。
在前文中我们已经进行了相关的开发实践,感兴趣的话可以自行移步阅读即可:
《AI无人机巡检革新边坡排水沟智慧巡检运维,基于YOLOv10全系列【n/s/m/b/l/x】参数模型开发构建AI无人机航拍巡检场景下边坡排水沟堵塞异常智能化检测预警系统》
《AI无人机巡检革新边坡排水沟智慧巡检运维,基于YOLOv11全系列【n/s/m/l/x】参数模型开发构建AI无人机航拍巡检场景下边坡排水沟堵塞异常智能化检测预警系统》
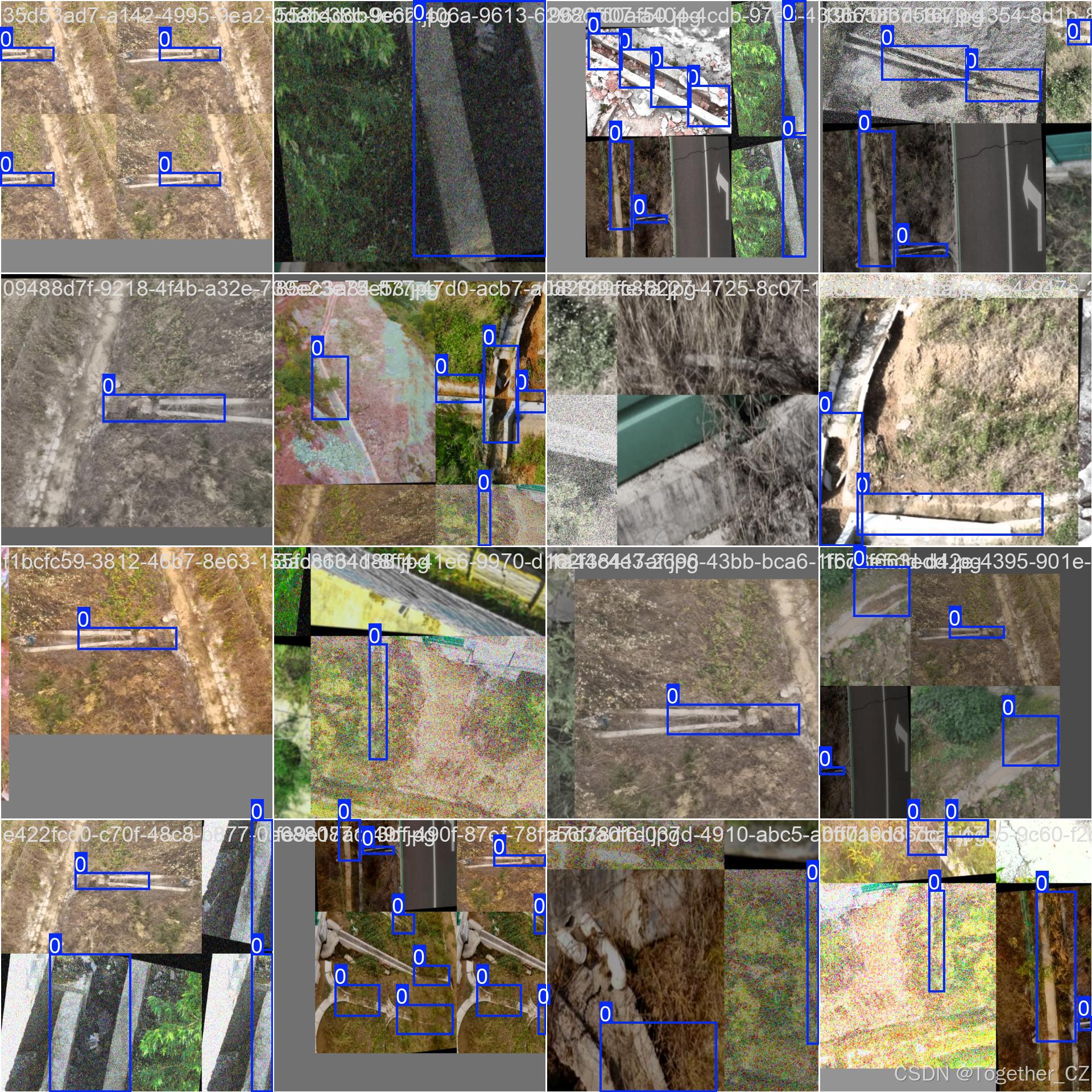
本文主要是想要基于YOLOv12全系列的模型来进行相应的开发实践,首先看下实例效果:
接下来看下实例数据情况:
YOLO系列最近的迭代速度不可谓不快,可能感觉YOLOv11都还没有推出多久,YOLOv12就这么水灵灵地来了,下面是对YOLOv12论文的阅读记录,感兴趣的话可以自行移步阅读即可:
官方发布的预训练权重如下:
Turbo (default):
| Model (det) | size (pixels) | mAPval 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.4 | 1.60 | 2.5 | 6.0 |
| YOLO12s | 640 | 47.6 | 2.42 | 9.1 | 19.4 |
| YOLO12m | 640 | 52.5 | 4.27 | 19.6 | 59.8 |
| YOLO12l | 640 | 53.8 | 5.83 | 26.5 | 82.4 |
| YOLO12x | 640 | 55.4 | 10.38 | 59.3 | 184.6 |
v1.0:
| Model (det) | size (pixels) | mAPval 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|
| YOLO12n | 640 | 40.6 | 1.64 | 2.6 | 6.5 |
| YOLO12s | 640 | 48.0 | 2.61 | 9.3 | 21.4 |
| YOLO12m | 640 | 52.5 | 4.86 | 20.2 | 67.5 |
| YOLO12l | 640 | 53.7 | 6.77 | 26.4 | 88.9 |
| YOLO12x | 640 | 55.2 | 11.79 | 59.1 | 199.0 |
| Model (seg) | size (pixels) | mAPbox 50-95 | mAPmask 50-95 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|---|
| YOLOv12n-seg | 640 | 39.9 | 32.8 | 1.84 | 2.8 | 9.9 |
| YOLOv12s-seg | 640 | 47.5 | 38.6 | 2.84 | 9.8 | 33.4 |
| YOLOv12m-seg | 640 | 52.4 | 42.3 | 6.27 | 21.9 | 115.1 |
| YOLOv12l-seg | 640 | 54.0 | 43.2 | 7.61 | 28.8 | 137.7 |
| YOLOv12x-seg | 640 | 55.2 | 44.2 | 15.43 | 64.5 | 308.7 |
| Model (cls) | size (pixels) | Acc. top-1 | Acc. top-5 | Speed (ms) T4 TensorRT10 | params (M) | FLOPs (G) |
|---|---|---|---|---|---|---|
| YOLOv12n-cls | 224 | 71.7 | 90.5 | 1.27 | 2.9 | 0.5 |
| YOLOv12s-cls | 224 | 76.4 | 93.3 | 1.52 | 7.2 | 1.5 |
| YOLOv12m-cls | 224 | 78.8 | 94.4 | 2.03 | 12.7 | 4.5 |
| YOLOv12l-cls | 224 | 79.5 | 94.5 | 2.73 | 16.8 | 6.2 |
| YOLOv12x-cls | 224 | 80.1 | 95.3 | 3.64 | 35.5 | 13.7 |
一共提供了n、s、m、l和x五款不同参数量级的模型。
这里我们保持完全相同的实验参数设置来进行四款模型的开发训练,等待训练完成之后我们来整体进行各项指标的对比分析。
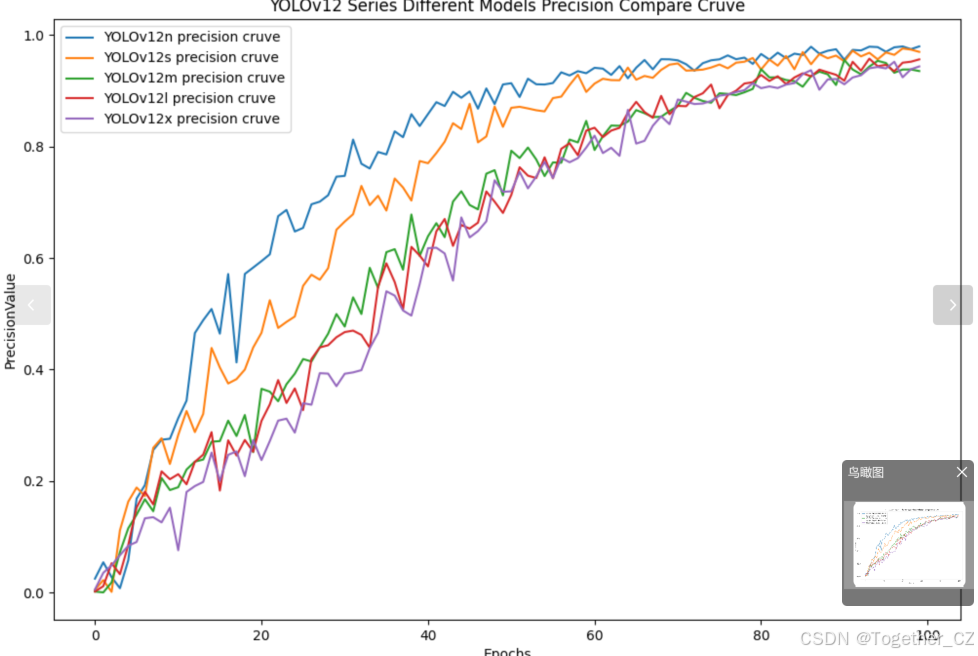
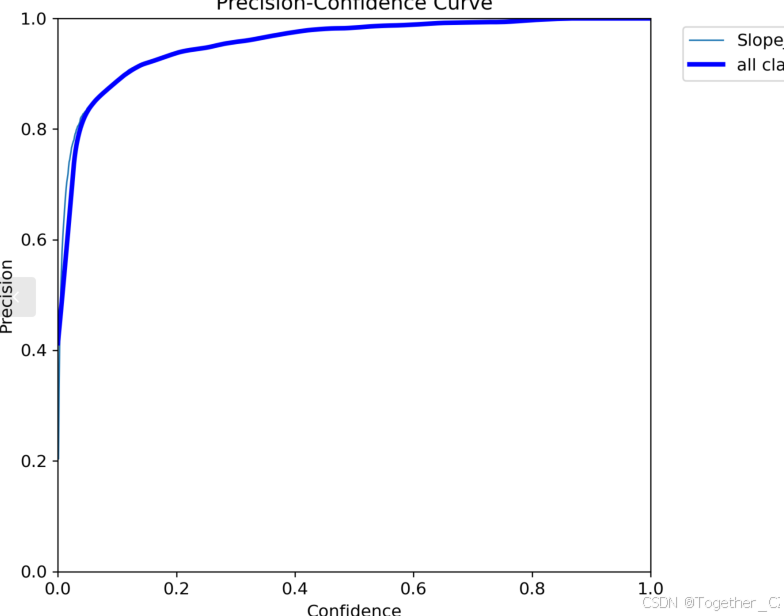
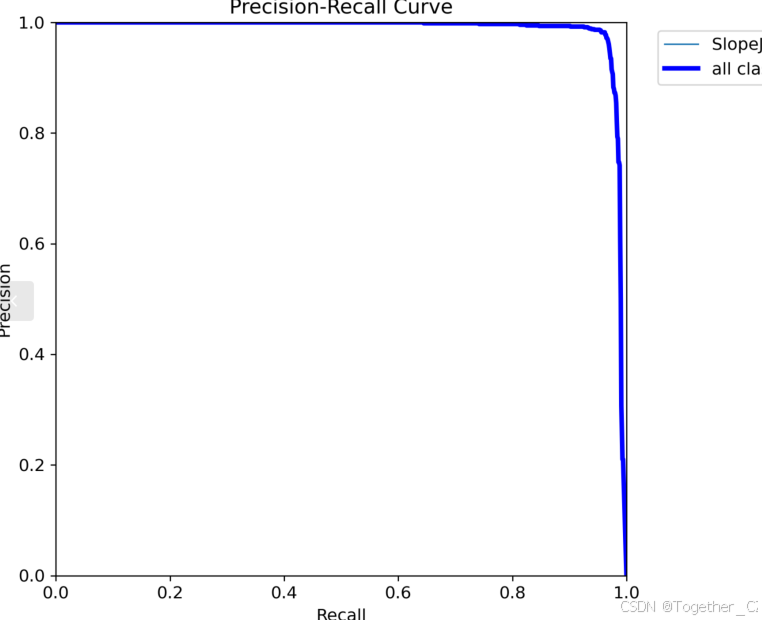
【Precision曲线】
精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。
绘制精确率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率和召回率。
将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。
根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
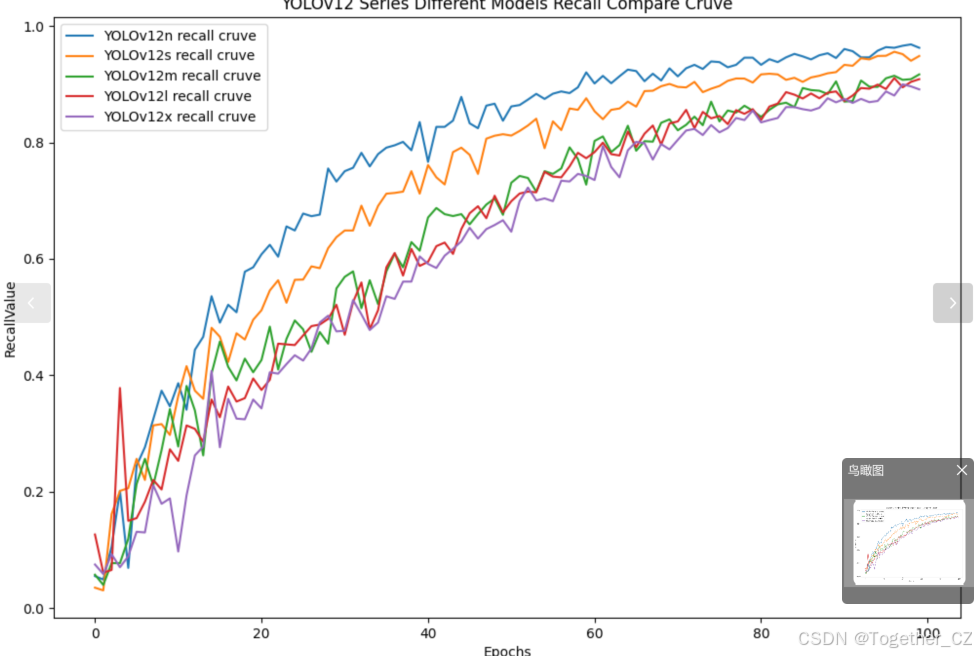
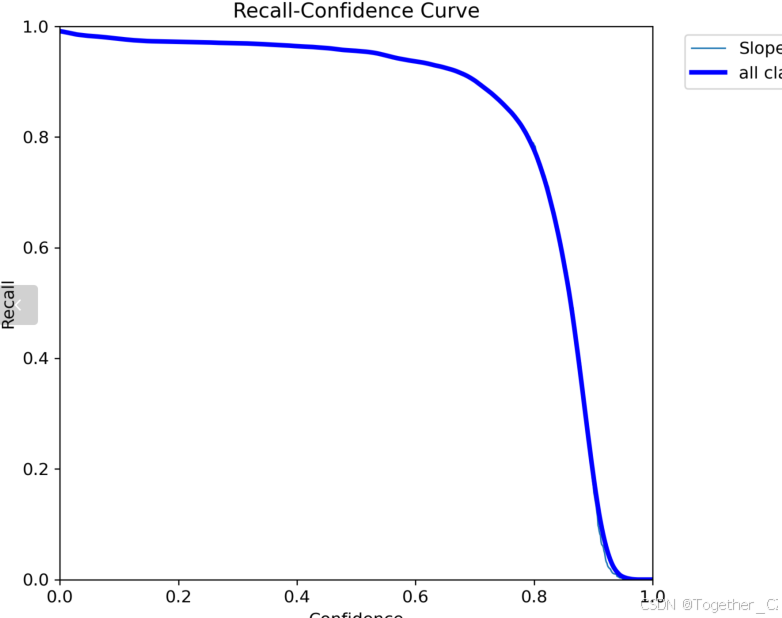
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
绘制召回率曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的召回率和对应的精确率。
将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。
根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。
召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
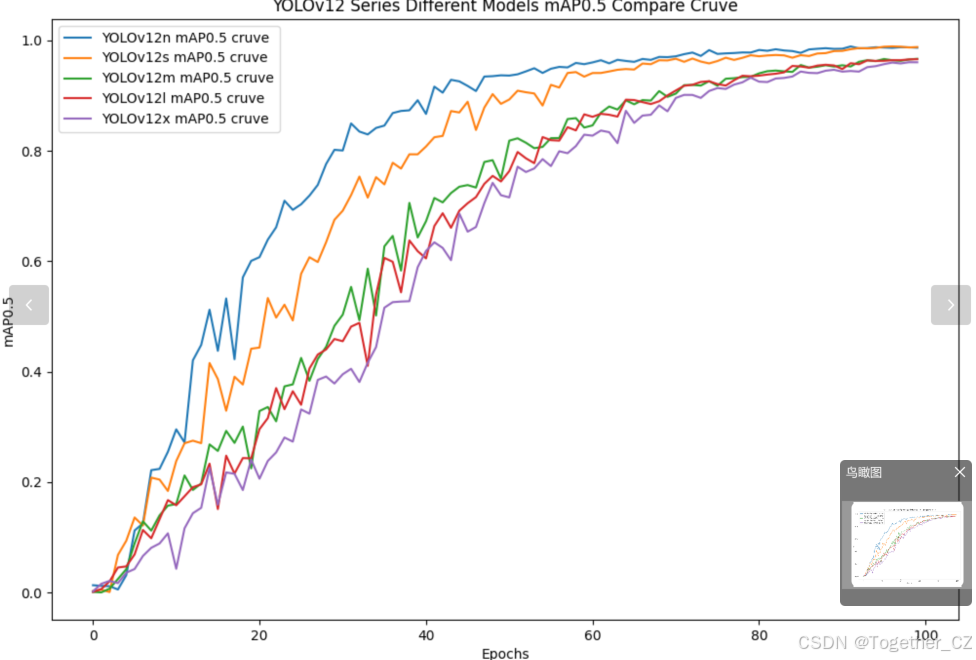
【mAP0.5】
mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。
在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。
mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
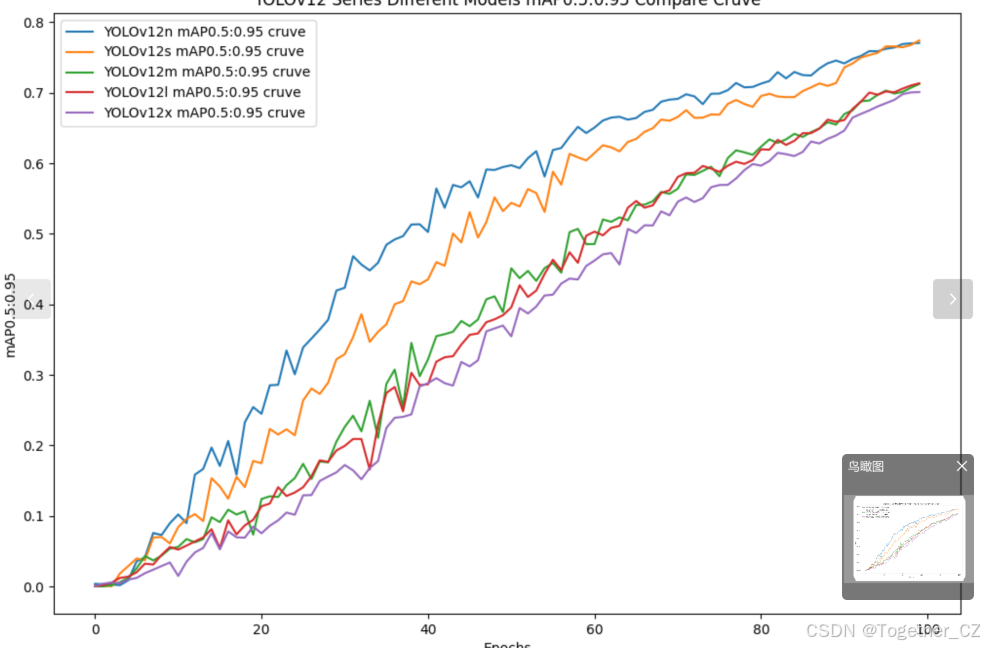
【mAP0.5:0.95】
mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。
这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。
对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。
综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
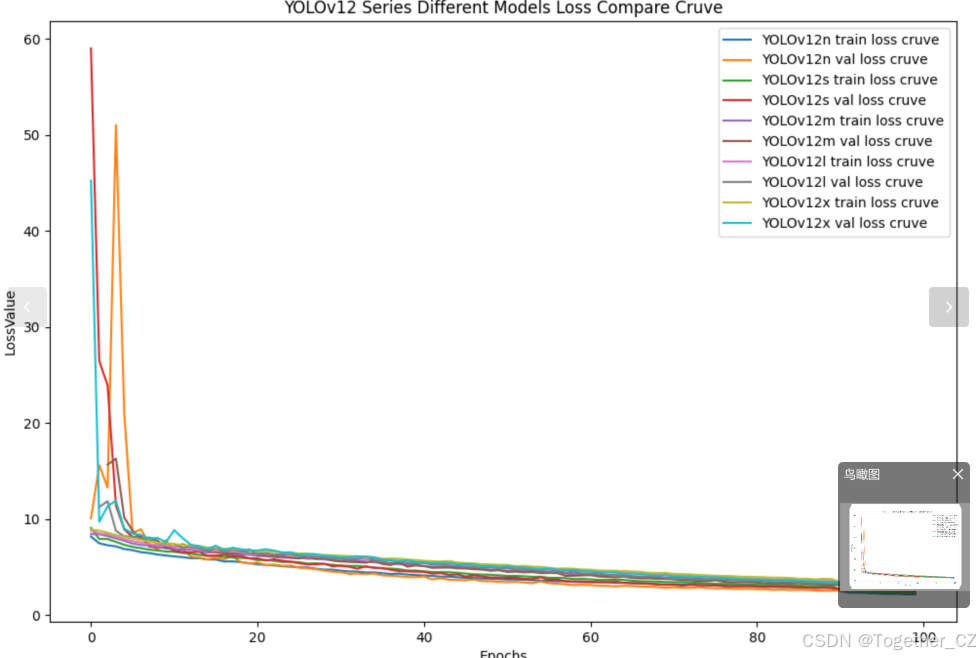
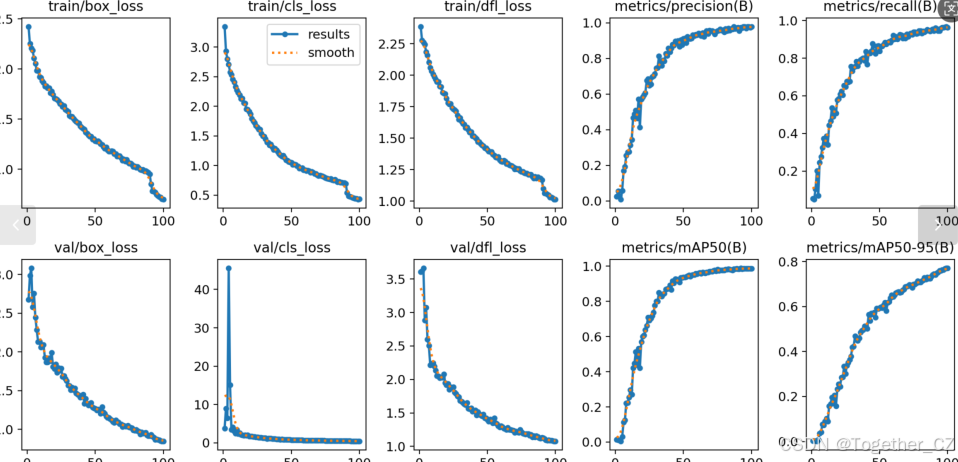
【loss曲线】
在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。
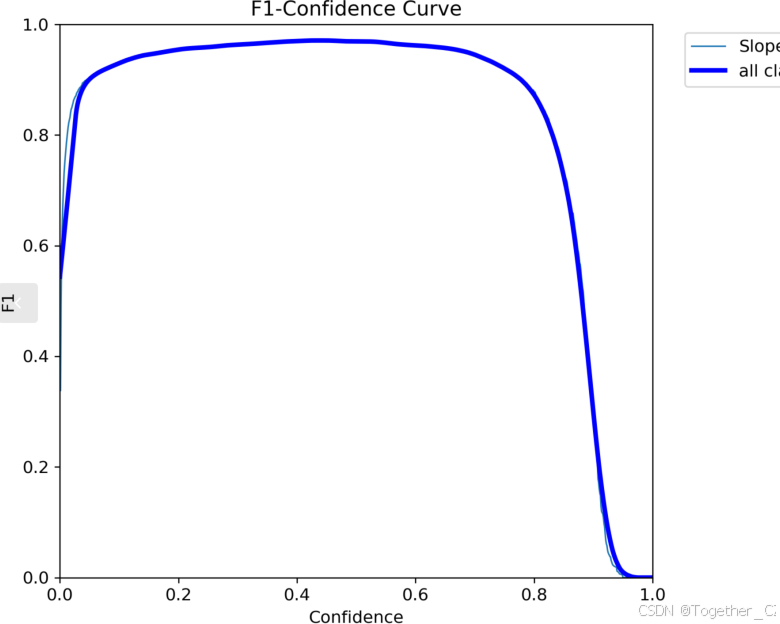
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
绘制F1值曲线的步骤如下:
使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。
对于每个阈值,计算相应的精确率、召回率和F1分数。
将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。
根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。
F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
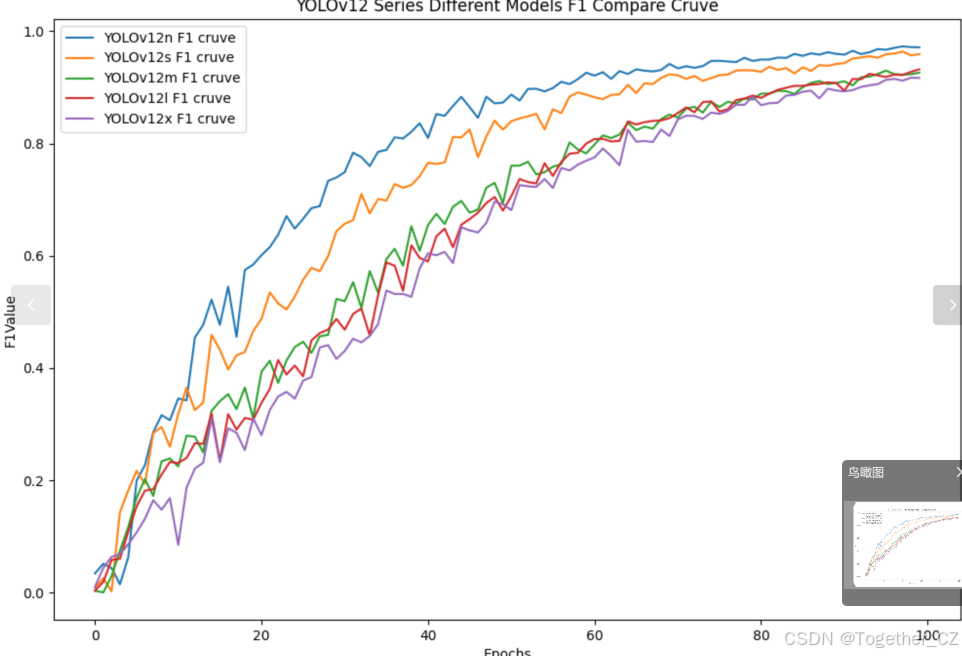
整体对比分析来看:不难发现五款不同参数量级的模型最终达到了较为相似的结果,没有拉开非常大的差距,这里综合参数量考虑我们最终选定了s系列的模型来作为线上的推理计算模型。
接下来看下s系列模型的详细情况。
【离线推理实例】

【Batch实例】
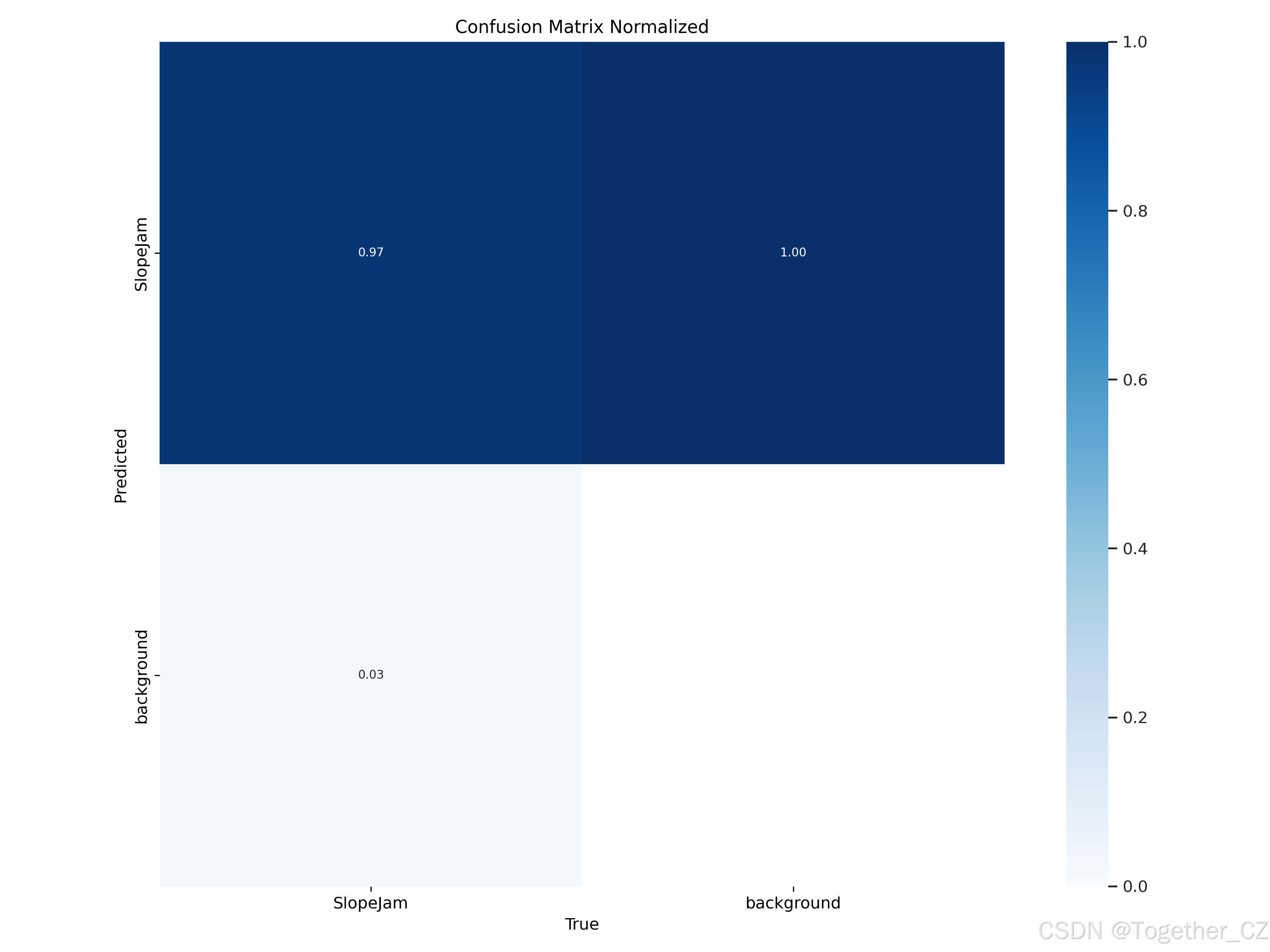
【混淆矩阵】
【F1值曲线】
【Precision曲线】
【PR曲线】
【Recall曲线】
【训练可视化】
AI+无人机的智能化巡检模式已逐步在交通、水利、能源等领域推广,未来可进一步拓展:
- 多机协同:多架无人机编队巡检,覆盖更大区域;
- 边缘计算:在无人机端部署轻量化AI模型,实现离线实时分析;
- 数字孪生:结合BIM技术构建边坡排水沟数字孪生体,模拟不同工况下的排水效果,优化设计方案。
AI与无人机的融合,正重新定义边坡排水沟的巡检运维范式。通过“天空之眼”与“智能大脑”的协同,传统工程运维正迈向高效化、精准化、智能化的新阶段。这一变革不仅降低了成本与风险,更为基础设施的长期安全运行提供了科技保障,助力行业向“智慧化”深度转型。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











