




👉️关注公众号Tensor实验室,,第一时间获取大厂算法校招、社招信息、最新论文工作(大模型、具身智能、CV、扩散模型、多模态、自动驾驶、医疗影像、AIGC、遥感等方向的论文解读)、最新AI发展趋势和学习资料等,赶快加入一起学习吧!
CVPR 2025 论文和开源项目合集请戳 CVPR2025-PapersWithCode
AI垂直方向交流群和论文投稿群已成立!
👨🔧👩🔧👨🔬👩🔬👨🚀👨🚒🕵️: 欢迎进群 | Welcome
目前已经开设的AI细分垂直方向交流群包括但不限于: 大模型、多模态、具身智能、CV、扩散模型、目标检测、图像分割、目标跟踪、医学影像、遥感、3DGS、Mamba、NeRF、Transformer、GAN、异常检测/缺陷检测、SLAM、人脸检测&识别、OCR、NAS、Re-ID、超分辨率、强化学习、3D重建、姿态估计、自动驾驶、活体检测、深度估计、去噪、显著性目标检测、车道线检测、模型剪枝&压缩、去雾、去雨、行为识别、视频理解、图像融合、图像检索等。
可以添加微信小助手微信:Tensor333或Tensor555,请备注:研究方向+地区+学校/公司名称+昵称!如:大模型+北京+北航+小北;一定要根据格式申请,可以拉你进对应的交流群。
如果目前方向未定的的同学,可以先加入大群(大群和垂直方向群可以同时加入)。可以添加微信小助手微信:Tensor333或Tensor555,请备注:方向未定+地区+学校/公司名称+昵称!如:方向未定+北京+北航+小北;
如果想进顶刊顶会论文投稿和交流群的同学。可以添加微信小助手微信:Tensor333或Tensor555,请备注:顶刊顶会名称+地区+学校/公司名称+昵称!如:CVPR+北京+北航+小北;
Authors: Jovana Videnovic, Alan Lukezic, Matej Kristan
Paper: https://arxiv.org/abs/2411.17576
Code:
Home: https://github.com/jovanavidenovic/DAM4SAM
目录
一、现存问题🌟
二、相关研究和难点📚
三、解决方法(创新点)🔥
四、实验结果分析📈
五、未来工作建议💡
六、总结🌳
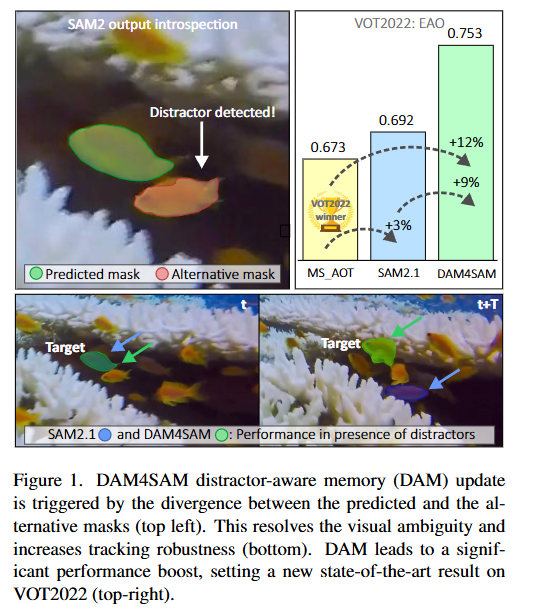
简介:基于内存的跟踪器是一种视频对象分割方法,它通过将最近跟踪的帧连接到内存缓冲区来形成目标模型,并通过关注当前图像与缓冲帧之间的关联来定位目标。尽管基于内存的跟踪器已在许多基准测试中取得了优异的性能,但最近发布的 SAM2 才使它成为视觉对象追踪社区关注的焦点。然而,现代跟踪器在干扰项存在的情况下仍然举步维艰。我们认为需要一个更复杂的内存模型,并提出了一种新的 SAM2 干扰项感知内存模型和一种基于自省的更新策略,以共同解决分割精度和追踪鲁棒性问题。最终的跟踪器被命名为 SAM2.1++。我们还提出了一个新的干扰项提取的 DiDi 数据集,以便更好地研究干扰项问题。SAM2.1++ 在七个基准测试中的表现优于 SAM2.1 及其相关的 SAM 内存扩展,并在其中六个基准测试中创下了新的最佳性能。
一、现存问题
这篇论文试图解决视觉目标跟踪(Visual Object Tracking)中由于干扰物(distractors)导致的跟踪失败问题。具体来说,论文指出,尽管基于记忆(memory-based)的跟踪器已经在多个基准测试中取得了优异的性能,但在面对干扰物时,现代跟踪器仍然会遇到困难。干扰物是指那些难以与跟踪目标区分的图像区域,包括与目标相似的外部干扰物(如附近的其他物体)以及内部干扰物(如目标自身某些部分的相似区域)。当目标离开并重新进入视野时,外部干扰物尤其具有挑战性。
为了解决这一问题,论文提出了一个新的干扰物感知记忆模型(Distractor-Aware Memory, DAM)以及一种基于内省(introspection-based)的更新策略,旨在同时提高分割精度和跟踪鲁棒性。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1076
1076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









