



雷达的任务
雷达是英文 Radar 的音译,源于 Radio Detection and Ranging 的缩写,原意是“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置,因此雷达也称为“无线电定位”。
雷达回波中的可用信息
- 当目标的大小,小于雷达的距离分辨率,这是目标可看作为一个点,用于对目标的距离和空间角度进行定位,其位置变化了可以由距离和角度随时间变化的规律中进行得到,并建立对目标的跟踪。
- 当目标的尺寸较大,并且雷达的距离分辨率在以为或者多为上面有足够的分辨率,物体可以由多个散射点组成的复杂目标,从而得到目标的尺寸和形状信息。
- 采用不同极化,也可测量目标形状的对称性。
- 从原理上讲,雷达还可以测量目标的表面粗糙度以及接点特性等等
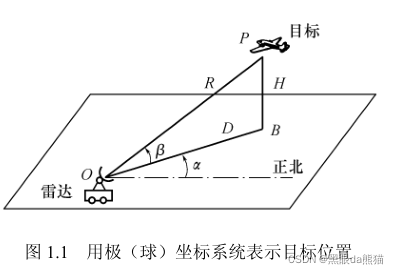
空间坐标系常用直角坐标系来表示,P点位置(x,y,z)
球坐标
- 目标的斜距 R
- 方位角 α
- 仰角 β
圆柱坐标系:方便获得水平和高度距离
- 水平距离 D
- 方位角 α
- 高度 H
目标斜距的测量
- 距离测量
根据电磁波由发送到接收到的时间差进行计算:
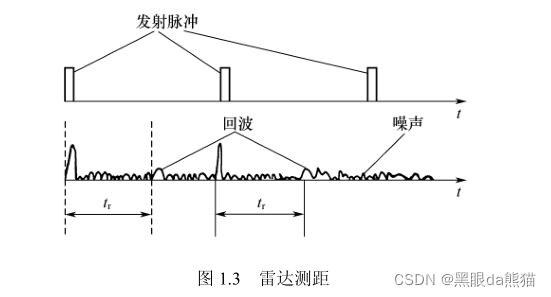

优点,能够在远距离和近距离测量目标是雷达一突出特点,手气候条件影响小。
测距的精度和分辨率与发射信号带宽精度可达到数十米量级,精密系统可达到亚米级。
- 角位置测量
角位置信息指:方位角和仰角
雷达的天线的有方向性的,在天线的窄波束的正对轴时,回波信号最强,当目标偏离时回波变弱,根据信号强度最强的天线波速指向就哭确定目标的方向。
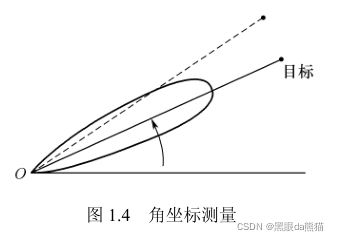
提高角测量精度:郑家天线尺寸,波束变窄。
典型情况下,测角精度可达约 1/10 波束宽度,而用于靶场测量的单脉冲雷达测角精度可达0.1 毫弧度均方根 (0.006°)’ 。
回波的波前方向(角位置)还可以用测量两个分离接收天线收到信号的相位差来决定。
- 速度测量
原理:当目标和雷达站之间存在相对速度时,接收到的回波信号载频相对于发射信号的载频产生一个频移(多普勒频移)
fd 为多普勒频移,单位为 Hz;vr 为雷达与目标之间的径向速度,单位为 m/s;λ 为载波波长,单位为 m。
雷达只要能够测量出回波信号的多普勒频移 fd,就可以确定目标与雷达站之间的相对速度。
径向速度也可以用距离的变化率求得,此时精度不高但不会产生模糊。无论是用距离变化率或用多普勒频移来测量速度,都需要时间。观测时间越长,则速度测量精度越高。
多普勒频移除用做测速外,更广泛的是应用于动目标显示(MTI)、脉冲多普勒(PD)等雷达中,以区分运动目标回波和杂波。
- 目标的尺寸与形状
如果雷达测量具有足够高的分辨力,目标可视为具有多个散射点的复杂目标时就可以提供目标尺寸的测量。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









