







当我们接触到FuSa(ISO:26262)与SOTIF(ISO:21448)的概念时,我们自然会想到这两者是什么样的关系。 以下通过讨论Fusa与SOTIF研究范围的异同,以显示两者协同作用的潜力。
1、根据三圆行为模型进行研究范围对比

来源: ISO 21448_2021(E)
-
ISO 26262 明确排除了相关项的标称性能的安全方面,ISO 21448 明确包含整车层级的特定行为的安全,因此包含了标称性能;
-
ISO 26262 明确了解决了E/E随机硬件故障,引发的紧急运行也可能有SOTIF相关;
-
对于复杂系统面对的复杂外部环境,是26262没有讲述完全的,由SOTIF文档做补充;
-
ISO21448旨在补充ISO26262相关的安全要素的额外要求的描述,当在SOTIF语境下讨论的E/E 元素也会被认为与ISO 26262 流程框架相关。
2、 根据安全问题的因果分类进行对比
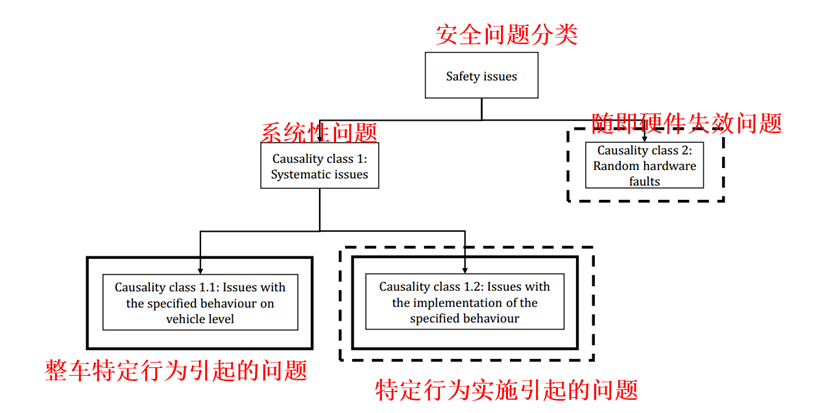
来源: ISO 21448_2021(E)
Causality class 1.1:整车层级的特定行为(引发的)问题
此分类包含由整车级别上的指定行为引起的安全问题。 SOTIF讨论的范围阐述了车辆层级特定行为所带来的风险,对于环境的正确感知对安全至关重要。环境的正确感知源自复杂的传感器和处理算法(摄像头、激光雷达、雷达进行目标检测),对整车层面的规范不足时此类安全问题导致的原因。
Causality class 1.2:特定行为实施(引发的)问题
此分类包含由性能不足、元素级别的规范不足,及其他设计和实现问题引起的安全问题; 以上三种系统性安全问题是ISO 26262 讨论的范围,因为他们与E/E系统、组件、元素的潜在系统性故障有关,包括来自于SOTIF需求的故障; 在元素层级,性能不足和规格不足是SOTIF讨论的范围,这些与预期功能相关,其中适当的态势感知对安全至关重要。此类元素层级的功能性包括以下:
-
感知:环境感知。(例如,检测周围环境的静态和动态物体,使用车辆内部和外部的数据检测街道布局和自身车辆位置)
-
计划:决策算法。(基于前面提到的感知派生控制动作的控制算法)
-
行动:执行。(执行上述决策算法派生的控制请求)

















 1650
1650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









