



北京智源人工智能研究院 (BAAI) 正式发布具身数据创新基座。
通过开源CoRobot具身数据软件框架、

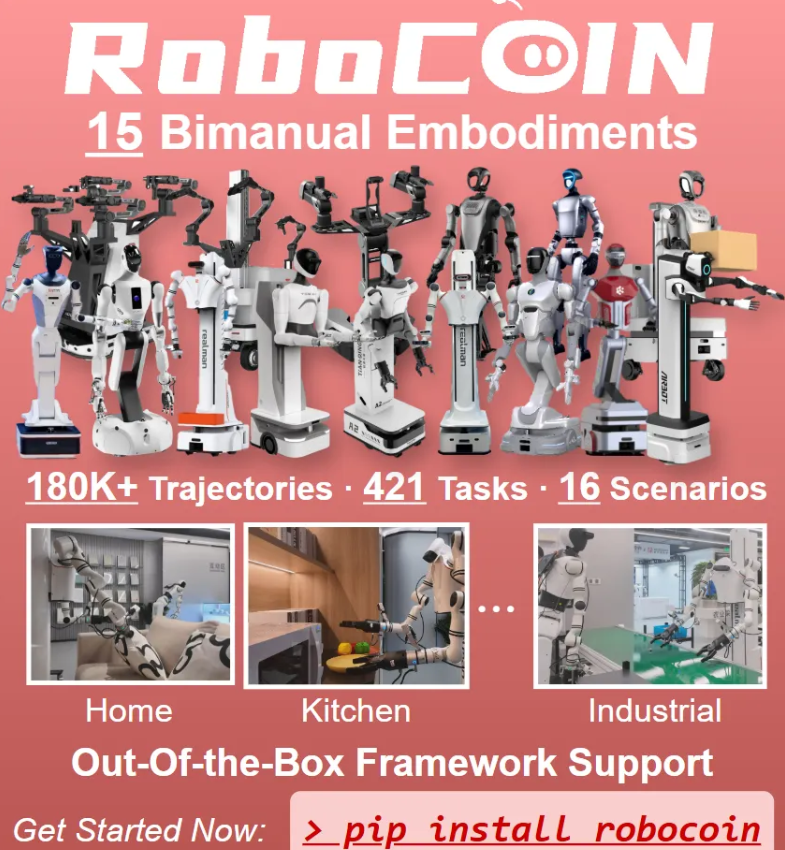
发布RoboCOIN高质量双臂机器人真机数据集、
以及推出RoboXstudio一站式平台,

系统性地解决了具身智能发展中数据孤岛、质控缺失与高昂成本三大核心难题,

为物理世界通用人工智能的实现构建了标准化的基础设施。
具身智能面临的三重困境
具身智能 (Embodied AI) 的核心在于将人工智能大脑与物理身体结合,使机器具备在真实世界中感知与交互的能力。
数据是这一进程中的燃料。
行业长期面临着严峻的挑战。各家机器人厂商与研究机构的数据格式不统一,标准缺失导致数据处理过程异常繁琐,形成了彼此隔离的数据孤岛。
工具链的分散使得数据跨平台复用壁垒极高,阻碍了通用模型的训练与泛化。
质量控制的缺失是另一大痛点。
现有的具身数据普遍存在丢帧、画面卡顿、静止帧冗余、关节信息缺失以及时间戳错位等记录问题。
在采集过程中,操作速度的过快或过慢缺乏统一规范,直接影响了模型对物理规律的学习效果。
成本问题限制了数据的规模化生产。
高质量具身数据的生成高度依赖人工操作与精细标注,效率低且投入大。
缺乏成熟的平台支撑,设备维护、场地租赁与专业人力投入使得综合生产成本居高不下。
这些因素共同制约了具身智能从实验室走向大规模产业应用。
CoRobot框架五大组件
针对上述行业痛点,智源研究院构建并开源了CoRobot具身数据软件框架。
该框架的设计初衷是面向异构本体、规范操作流程并提升研发效率,核心目标在于定标准、保质量与提效率。

CoRobot并非单一工具,而是一套涵盖数据全生命周期的技术底座,由五个核心组件构成,实现了从物理世界采集到数字世界训练的闭环。
DataCollect (泛本体数采工具) 解决了硬件接入的碎片化问题。
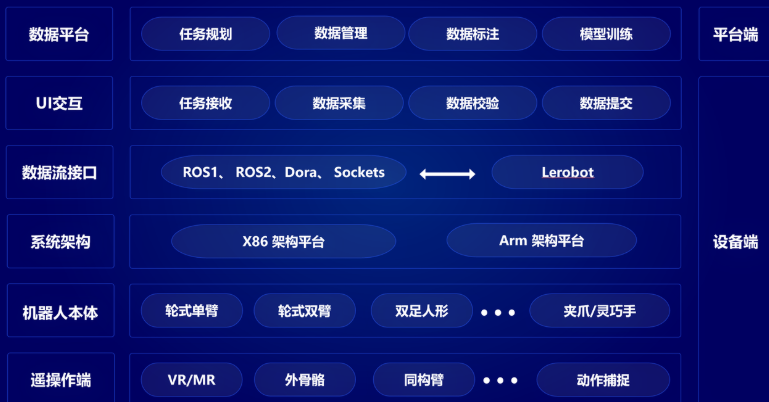
它支持接入各种机器人本体和遥操作设备,无论是基于ROS (机器人操作系统) 还是Dora等通讯协议,都能实现统一的数据流接入。
这种通用性打破了硬件品牌的限制,使得不同构型的机器人可以使用同一套标准进行数据采集,计划于2025年12月正式开源。
DataConvert (格式转换工具) 致力于消除数据格式壁垒。
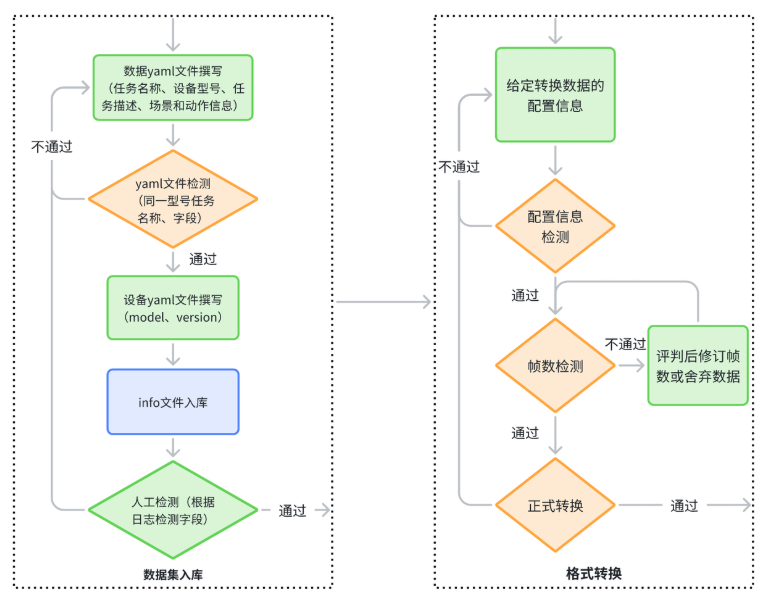
在多源数据汇聚的场景下,它支持RLDS、HDF5、JSONL等主流格式与CoRobot标准格式之间的双向转换。
这一工具确保了无论是历史存量数据还是新采集的数据,都能在统一的编码标准下流通,极大提升了数据的复用率。
DataForge (数据处理工具) 扮演着数据精炼厂的角色。
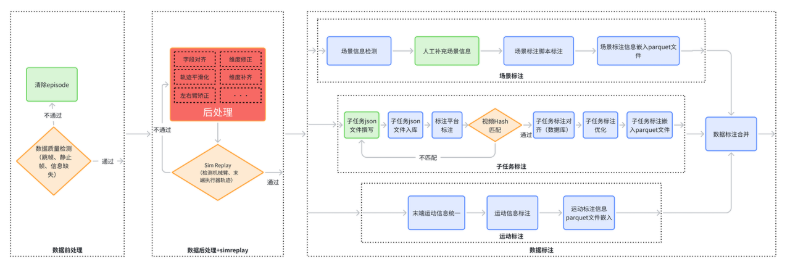
原始数据中常见的丢帧、卡顿、关节信息不齐和时间戳错位等问题,在此环节得到自动化修复。
该工具引入了分层标注体系,能够对数据进行场景、子任务及运动描述维度的精细化标注,将原始信号转化为富含语义的高质量资产。
DataManager (数据管理工具) 提供了可视化的数据治理能力。
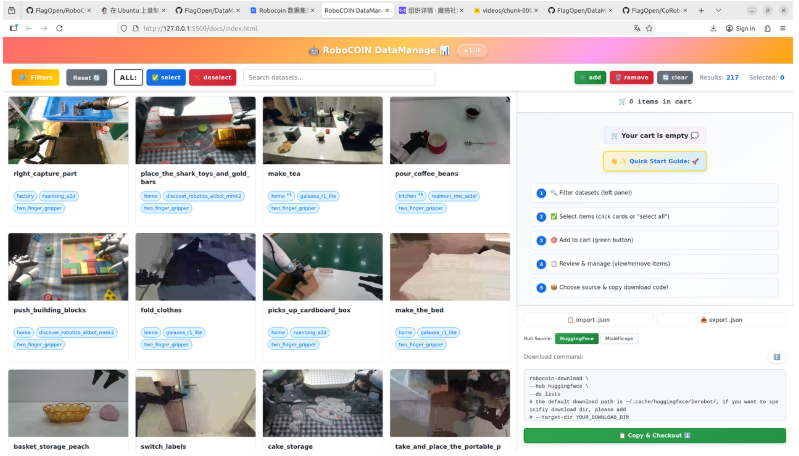
它支持具身数据的原子化存储与可视化预览,研究人员可以通过场景、机器人、末端执行器、动作及操作对象等多个维度对数据进行精准筛选。
其内置的购物车式下载功能,允许用户一键生成目标数据集的下载命令,极大降低了数据获取的门槛。
DataTrain (模型训推工具) 则是连接数据与算法的最后一环。
它支持π0、RDT、ACT、DP等主流具身模型的快速接入,并提供参数调节与训练进度管理功能。
开发者可以直接利用清洗处理好的数据验证算法模型,缩短了从数据到模型的迭代周期。
RoboCOIN数据集确立新标杆
依托CoRobot框架,智源研究院联合蚂蚁天玑实验室、银河通用、乐聚、软通天擎、松灵、星海图、智平方、睿尔曼等8家企业,以及清华大学、北京大学、中国人民大学、北京邮电大学、电子科技大学、斯坦福大学、加州大学伯克利分校和剑桥大学等顶尖高校,共同构建了RoboCOIN数据集。

RoboCOIN代表了当前全球双臂机器人真机数据的最高水平。
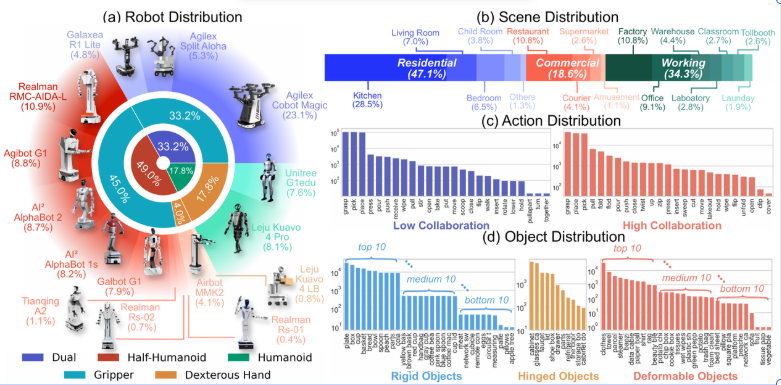
在本体数量上,它涵盖了15款不同构型的双臂机器人,远超此前开源数据集的设备多样性。
这种跨本体的数据分布对于训练具有泛化能力的通用具身大模型至关重要。
数据规模与丰富度方面,RoboCOIN包含了18万条真机示范轨迹,覆盖了工业生产、家庭服务、零售物流等10多个核心场景。
这些数据不是简单的重复,而是针对421个具体任务、50多种技能和500多种物体进行的系统性采集。
标注精度是RoboCOIN的核心优势。
借助CoRobot框架的能力,数据集实现了轨迹级、段级、帧级的三层次细粒度标注。
这种多粒度的语义信息,使得模型不仅能学习底层的运动控制,还能理解高层的任务规划逻辑。
智源研究院具身数据负责人姚国才将每一份高质量数据比作一枚金币,RoboCOIN寓意着全行业通过贡献数据“金币”,积少成多,共同换取通向物理通用人工智能 (AGI) 的船票。
开源生态加速迈向物理AGI
为了进一步释放数据与工具的价值,智源研究院推出了RoboXstudio具身智能一站式平台。
该平台集成了CoRobot开源框架、FlagOS-Robo具身训推一体化多芯片框架以及Emu3.5原生多模态世界大模型。
它构建了一个从数据采集、标注、管理到模型训练、评测及部署的全流程闭环体系。
RoboXstudio在采集端实现了标准化配置与实时监控,确保了源头数据的规范性。
在处理端,它利用多模态大模型的能力,内置智能算子,实现了任务的自动拆解与数据扩增,大幅降低了人工标注的成本与门槛。
智源坚持开源开放的战略。
截至2025年8月,FlagOpen体系的开源模型全球下载量已达6.9亿次。
此次RoboXstudio社区版正式免费向个人开发者、科研机构及企业开放,CoRobot框架代码与RoboCOIN数据资产也面向全社会无保留开源。
这种共享机制旨在打破行业壁垒,推动具身智能在统一的标准与规范下协同创新。
通过构建协同 (Collaboration)、一致 (Coherence) 与聚合 (Collective) 的数据生态,CoRobot与RoboCOIN不仅是一套工具与数据,更是连接数字大脑与物理世界的桥梁。
参考资料:
https://flagopen.github.io/RoboCOIN/
https://arxiv.org/abs/2511.17441
https://github.com/FlagOpen/RoboCOIN
https://github.com/FlagOpen/CoRobot
END


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









