



 介绍了一种基于用户输入棋盘特征来搜索围棋棋谱的方法,不仅考虑棋子位置还注重走棋顺序,并按匹配程度排序。
介绍了一种基于用户输入棋盘特征来搜索围棋棋谱的方法,不仅考虑棋子位置还注重走棋顺序,并按匹配程度排序。
题目:围棋棋谱的特征搜索
说明:
- 将用户的棋盘输入作为特征,在棋谱包中读取SGF棋谱,找出特征相符的棋谱。注:不仅要考虑棋子的位置,还要考虑走棋的顺序。
- 对找出的棋谱按照符合程度排序。
- 实现为桌面程序,实现技术不限。
- 此次作业采用pair programming的形式完成。提交作业后,在博客上发表日志贴上编程时的工作照。
以下是一个例子,
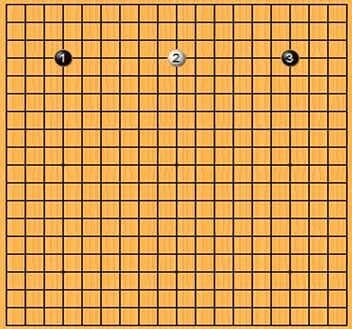
用户的棋盘输入如下:
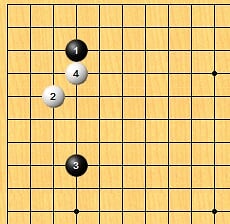
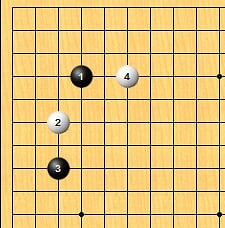
程序将会找到如下特征相符的棋谱:


关于更多的围棋规则,与棋谱特征搜索的例子,可以参考这个网站:
http://www.weiqiok.com/asp/Chinese.asp
下面给出一个更加常见的例子,大家可以作为利用这个例子对自己的程序自我测试。

















 923
923

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









