



 Maven是一种用于构建和管理Java项目的工具,它通过统一项目结构和jar包管理,简化了开发流程。本文介绍了Maven的基本概念,包括其项目结构特点、jar包共享机制,以及如何配置Maven使用阿里云镜像加速下载。
Maven是一种用于构建和管理Java项目的工具,它通过统一项目结构和jar包管理,简化了开发流程。本文介绍了Maven的基本概念,包括其项目结构特点、jar包共享机制,以及如何配置Maven使用阿里云镜像加速下载。
什么是Maven
Maven 是专门用于构建和管理Java相关项目的工具。
Maven是意第绪语,依地语(犹太人使用的国际语),表示专家的意思。
所以用Maven管理Java 项目,你就是专家了 -_-!
Maven 主要用处一:相同的项目结构
这个和unity有些相似,比如unity里的Resources文件夹,必须叫这个名
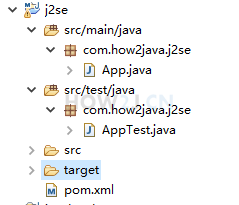
使用Maven管理的Java 项目都有着相同的项目结构
1. 有一个pom.xml 用于维护当前项目都用了哪些jar包
2. 所有的java代码都放在 src/main/java 下面
3. 所有的测试代码都放在src/test/java 下面
Maven 主要用处二:统一维护jar包
比如说有3个Java 项目,这些项目都不是maven风格。那么这3个项目,就会各自维护一套jar包。 而其中有些jar包是相同的。
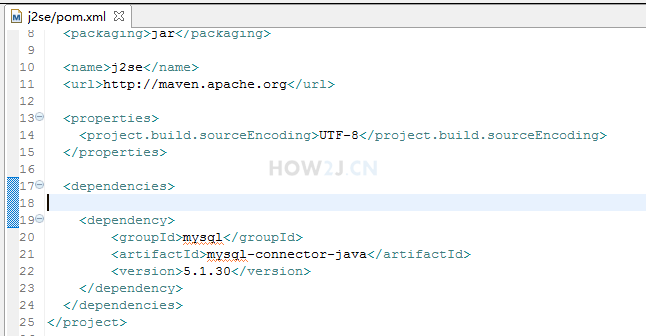
而maven风格的项目,首先把所有的jar包都放在"仓库“ 里,然后哪个项目需要用到这个jar包,只需要给出jar包的名称和版本号就行了。 这样jar包就实现了共享
如图所示,在pom.xml里,表示用到了mysql 的jar包,版本号是5.1.30。
那么仓库在哪里? 怎么建设呢? 在后续教程会讲到: 仓库
仓库概念
所谓的仓库就是用于存放项目需要的jar包的。
maven采用一个仓库,多个项目的方式,让多个项目共享一个仓库里的相同jar包。
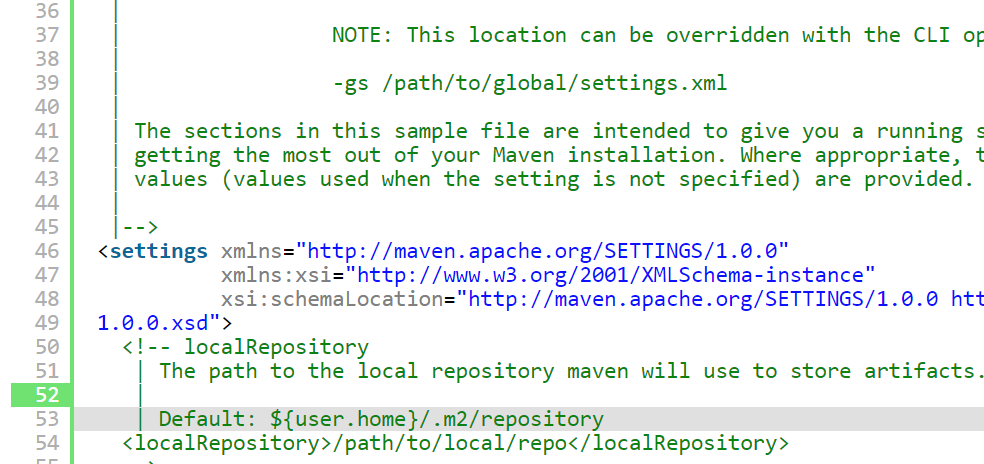
打开
D:\software\apache-maven-3.5.0\conf\settings.xml
可以看到,在52行指定了仓库的位置是${user.home}/.m2/repository。
对应我的机器就是
C:\Users\X7TI\.m2\repository
默认下载路径
maven 会默认从maven官方提供的服务器下载jar包。
而官方服务器在国外,因为大家都知道的原因,网速很慢,而且容易卡断。 为了便于快速下载相关jar包,可以使用国内maven 阿里云的下载地址
D:\software\apache-maven-3.5.0\conf\settings.xml
修改在mirrors下新加一个阿里云的镜像地址:
<mirror>
<id>alimaven</id>
<mirrorOf>central</mirrorOf>
<name>aliyun maven</name>
<url>http://maven.aliyun.com/nexus/content/repositories/central/</url>
</mirror>
下载与配置MAVEN
官方最新版下载地址:http://maven.apache.org/download.cgi
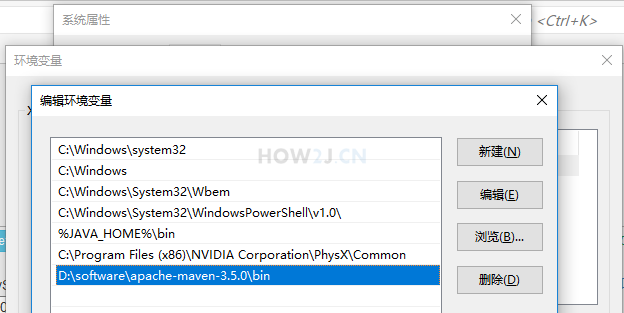
配置环境变量
右键我的电脑-属性-高级系统设置-环境变量-系统变量-Path
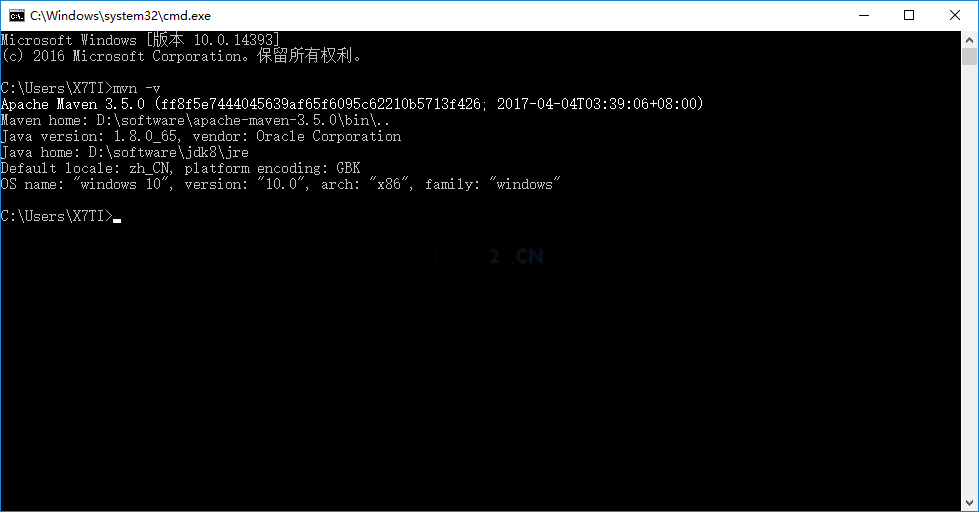
使用win+r, 然后输入cmd 打开命令行,输入如下命令
倘若出现如图所示的截图,即表示配置成功了


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











