



 本文介绍了使用STM32单片机控制的倒车雷达系统,包括超声波传感器、MOS管电机控制、OLED显示、ESP8266无线通信以及数据上传至OneNET云平台的过程。详述了程序设计和硬件初始化,以及如何下载和使用相关资源进行开发。
本文介绍了使用STM32单片机控制的倒车雷达系统,包括超声波传感器、MOS管电机控制、OLED显示、ESP8266无线通信以及数据上传至OneNET云平台的过程。详述了程序设计和硬件初始化,以及如何下载和使用相关资源进行开发。
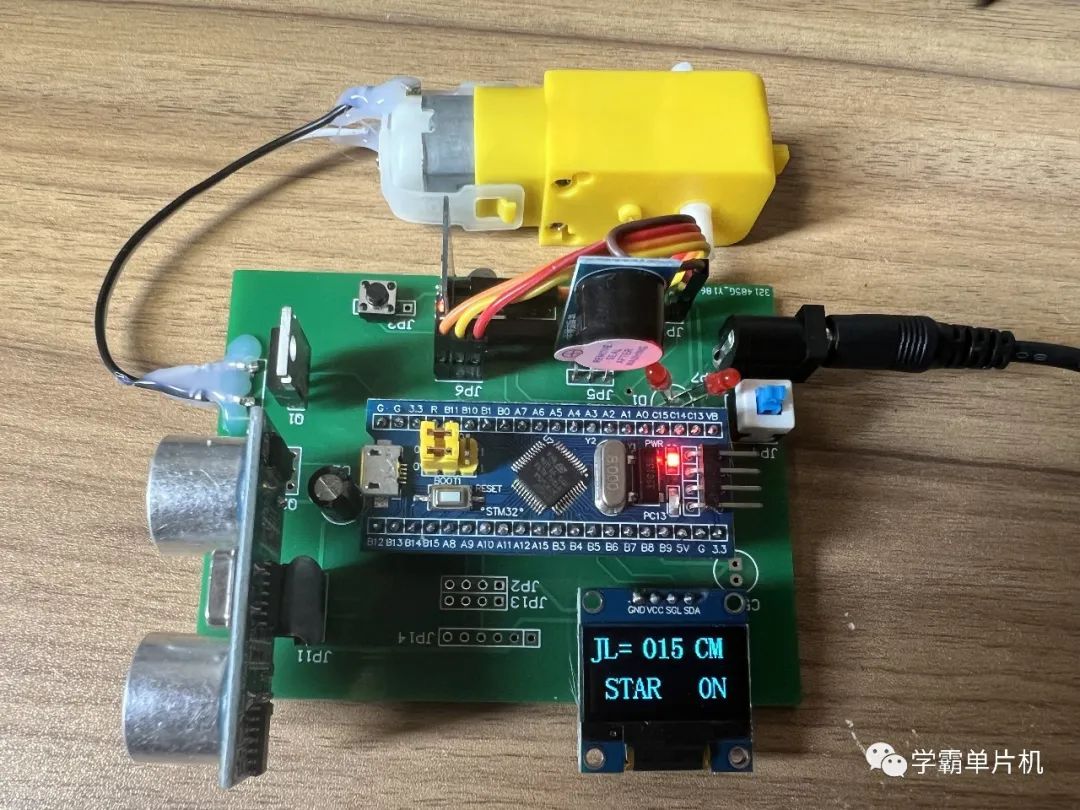
功能介绍:采用stm32单片机作为控制CPU,采用HC-SR04超声波模块采集倒车与障碍物之间的距离,采用MOS管驱动电机模拟汽车倒车,采用OLED显示相关数据,采用蜂鸣器进行报警,采用LED灯模拟汽车双闪灯,通过WiFi模块(ESP8266)将数据上传onenet云平台,文末有资料分享:
下面是实物演示视频和相关实物图片
59-基于stm32单片机倒车雷达报警系统数据上传云平台控制(程序+原理图+PCB+元件清单全套资料)
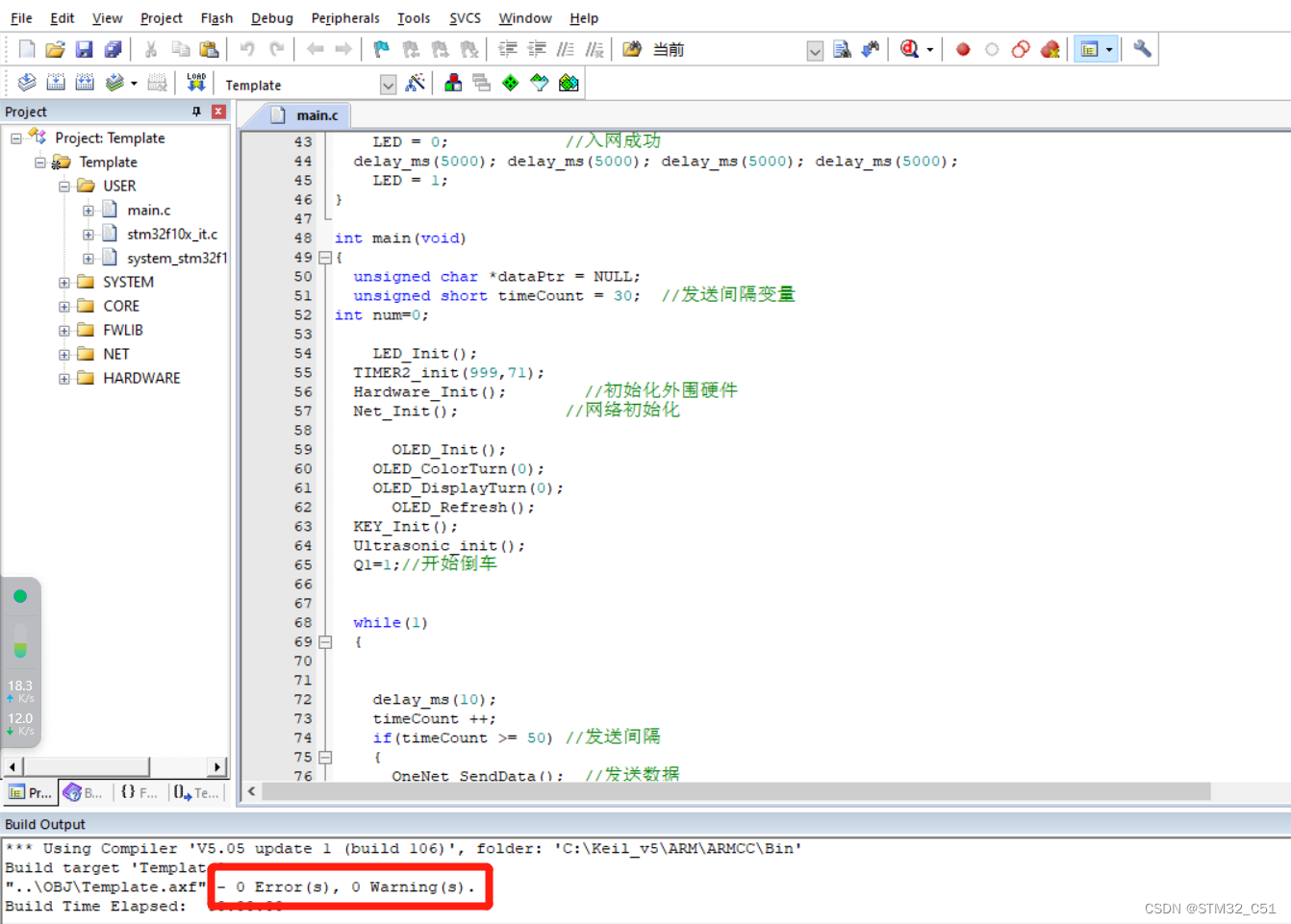
下面是程序部分展示(程序有中文注释,新手容易看懂)
部分程序展示:void Hardware_Init(void){NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级delay_init(); //延时函数初始化Usart1_Init(115200); //串口1初始化为115200Usart2_Init(115200); //串口2,驱动ESP8266用LED_Init(); //LED初始化}void Net_Init(){ESP8266_Init(); //初始化ESP8266while(OneNet_DevLink()) //接入OneNETdelay_ms(500);LED = 0; //入网成功delay_ms(5000); delay_ms(5000); delay_ms(5000); delay_ms(5000);LED = 1;}int main(void){unsigned char *dataPtr = NULL;unsigned short timeCount = 30; //发送间隔变量int num=0;LED_Init();TIMER2_init(999,71);Hardware_Init(); //初始化外围硬件Net_Init(); //网络初始化OLED_Init();OLED_ColorTurn(0);OLED_DisplayTurn(0);OLED_Refresh();KEY_Init();Ultrasonic_init();Q1=1;//开始倒车while(1){delay_ms(10);timeCount ++;if(timeCount >= 50) //发送间隔{OneNet_SendData(); //发送数据timeCount = 0;ESP8266_Clear();}dataPtr = ESP8266_GetIPD(0);if(dataPtr != NULL){OneNet_RevPro(dataPtr);}}}
程序打开办法:特别注意:下载资料包以后一定要先解压!!!(建议解压到桌面上,文件路径太深会导致程序打开异常),解压后再用keil5打开。

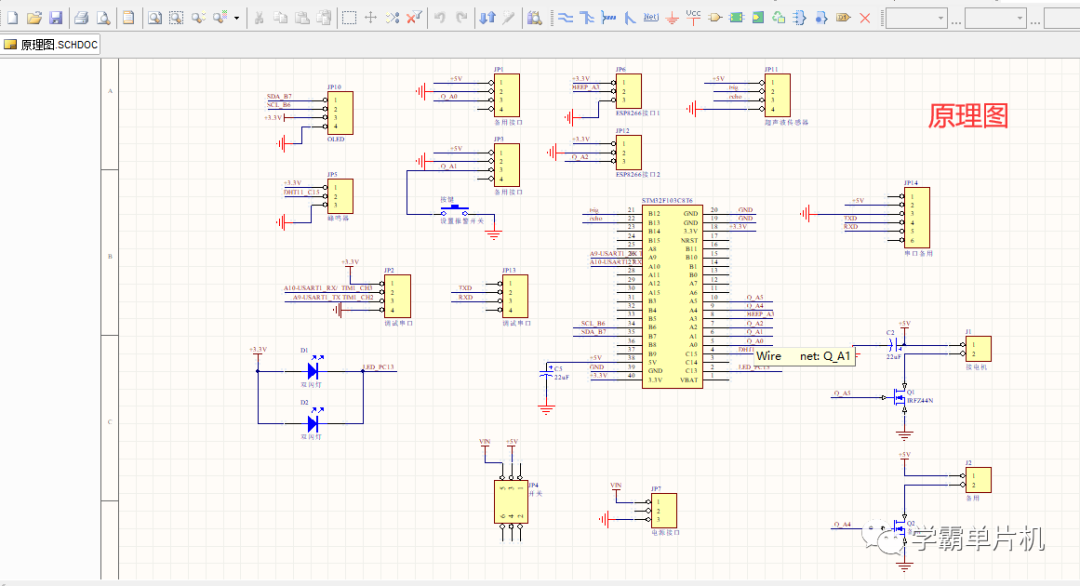
下面是原理图和PCB,采用【AD】altium designer打开,文件中有安装包
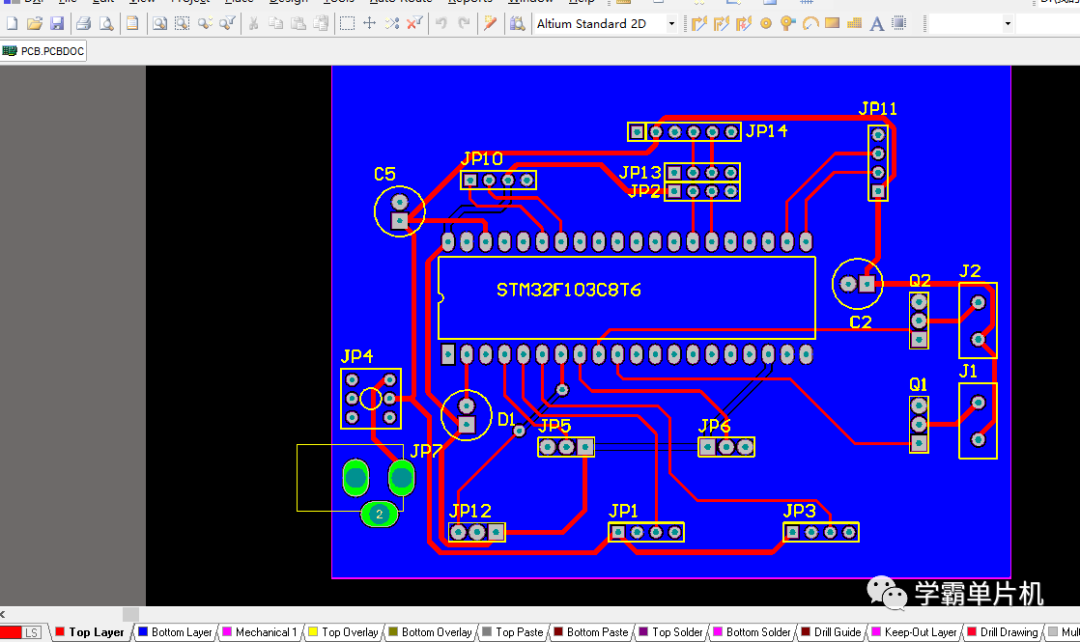
下面是PCB文件
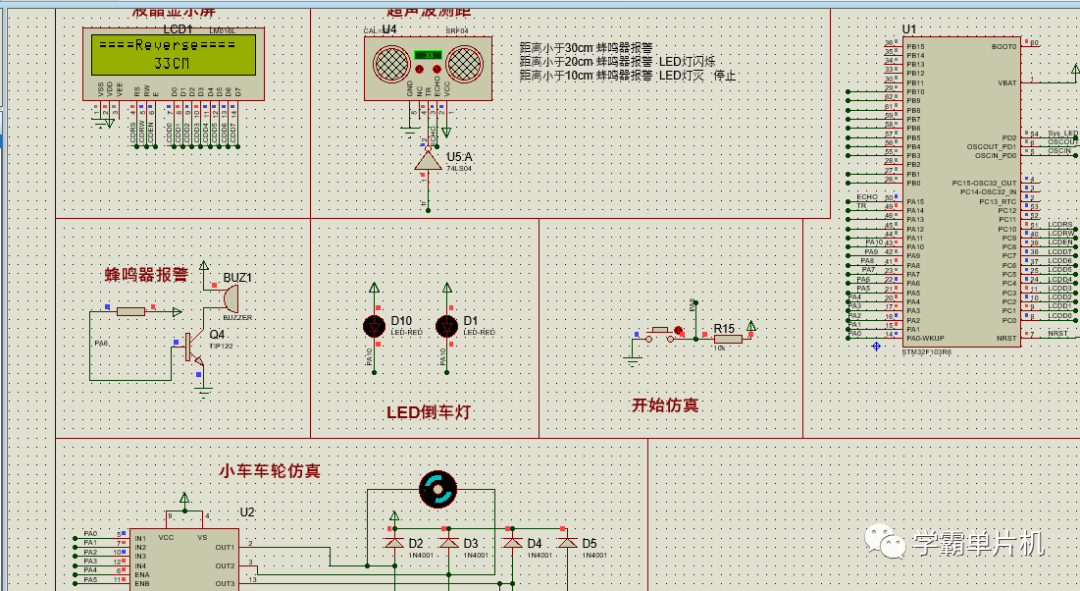
下面是仿真图,采用Proteus8.9版本打开仿真文件:
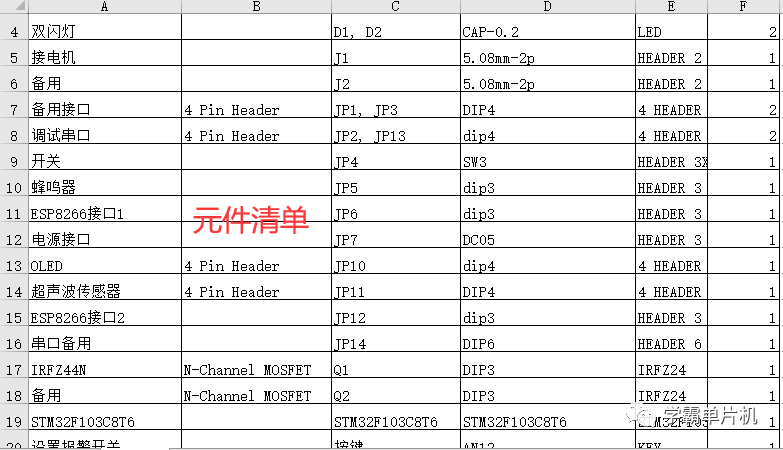
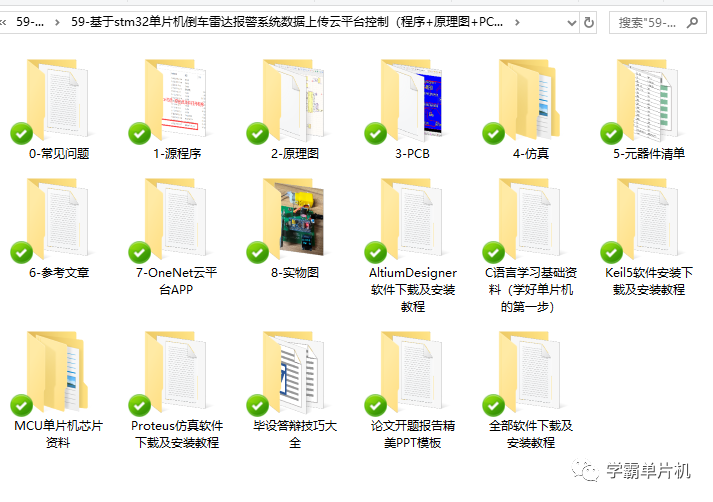
下面是资料包里面包含的相关文件展示

















 6052
6052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









