



 本文介绍了如何使用Arduino和Basra主控板控制舵机驱动的夹爪模组,涉及直接、缓慢运动及自定义函数实现,还分享了3D模型和程序代码下载。通过舵机的0-180度行程控制,实现模组的张合操作。
本文介绍了如何使用Arduino和Basra主控板控制舵机驱动的夹爪模组,涉及直接、缓慢运动及自定义函数实现,还分享了3D模型和程序代码下载。通过舵机的0-180度行程控制,实现模组的张合操作。
1.运动功能说明
夹爪模组的主要运动模式为张开以及闭合。
2.结构说明
构成本模组的零部件主要是舵机(行程0度~180度)、舵机输出头、舵机支架、齿轮组、连杆组等。

3.运动功能实现
3.1 电子硬件
本实验中采用如下硬件:
Basra主控板(基于Arduino开源方案设计的一款开发板)、Bigfish扩展板、7.4V锂电池
【Basra主控板的相关介绍可点击查看https://www.robotway.com/col.jsp?id=135;Bigfish扩展板的相关介绍可点击查看https://www.robotway.com/col.jsp?id=136】
将舵机接到BigFish扩展板的D3引脚。

3.2 编写程序
编程环境:Arduino 1.8.19
驱动本模组实际就是驱动舵机,但是需要注意舵机的摆动行程,防止堵转。机械爪张开时对应舵机角度约135°,闭合时对应舵机角度约45°,此数值仅供参考,请您以实际测试值为准。
3.2.1直接运动(使用舵机库)
机械爪初始位置为张开,之后等待一秒。随后闭合,等待一秒。
代码如下(点击查看:Servo_Move.ino)

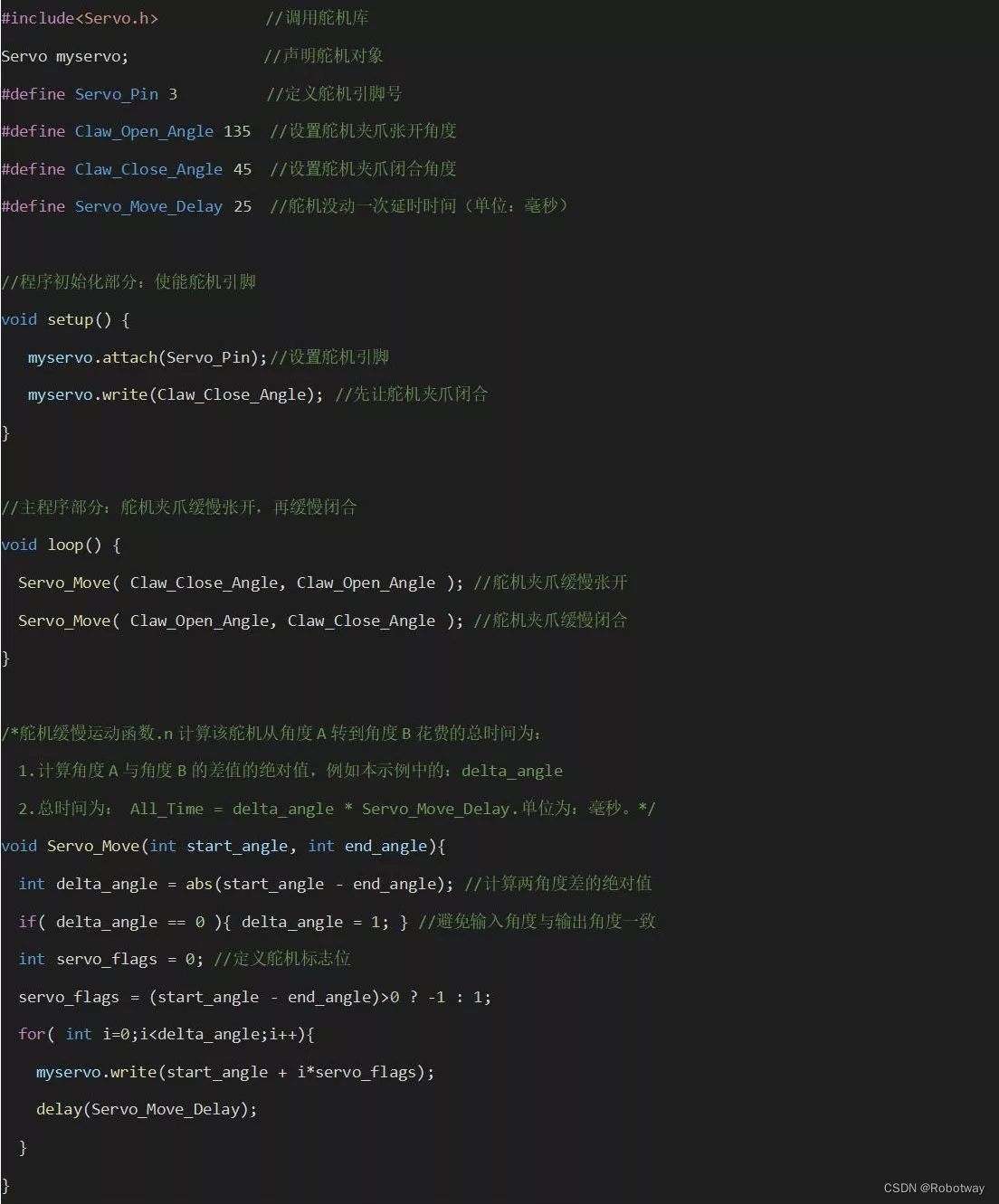
3.2.2缓慢运动(使用舵机库)
第二种方式为舵机缓慢张开和闭合。程序如下(点击查看:Servo_Move_Slowly.ino)
3.2.3直接运动(使用自定义函数)
如果我们的arduino IDE软件中没有<Servo.h>库函数,我们还需要驱动舵机,我们可以自己编写舵机驱动函数。
程序如下(点击查看:Servo_Move_Other.ino)

4.扩展样机
使用不同的舵机和支架,可以构建出不同形态的舵机夹爪模组,如图所示:

5.资料下载
| 资料内容 | 模组3D文件、程序代码 |
| 下载途径 | https://www.robotway.com/h-col-122.html |


















 3061
3061

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









