



 APPlink作为RestCloud的自动化平台,帮助企业和个人简化集成,提高工作效率。一定签则提供电子合同全生命周期管理,结合CRM系统优化销售、客服、审批和合作伙伴协议签署流程,实现数字化转型和数据安全。
APPlink作为RestCloud的自动化平台,帮助企业和个人简化集成,提高工作效率。一定签则提供电子合同全生命周期管理,结合CRM系统优化销售、客服、审批和合作伙伴协议签署流程,实现数字化转型和数据安全。
APPlink是什么
APPlink是RestCloud打造的一款简单易用的零代码自动化集成平台,为业务流程提供自动化的解决方案,将企业内部的核心系统以及第三方应用程序和云服务等进行集成。无论是开发人员还是业务人员,都可以使用APPlink轻松构建出高效、自动化的工作流,并将您的工作效率提升到一个新的水平。
一定签是什么
一定签是一家专注于个人数字证书、电子签章、电子合同管理、电子身份认证等服务为核心的科技创新型国家高新技术企业,致力于帮助企业实现降本增效,为企业提供一站式电子合同全生命周期智能管理服务
一定签结合CRM系统服务的使用场景有哪些
-
销售合同签署:销售团队可以在CRM系统中跟踪销售机会和客户信息,并通过E签宝服务发送合同给客户进行电子签署。这样可以加快合同签署速度,缩短销售周期,并提供更便捷的签署方式
-
客户服务协议签署:客户服务团队可以在CRM系统中记录客户反馈和需求,并使用E签宝服务发送服务协议或条款给客户进行签署。这简化了客户服务流程,提高客户满意度,并确保协议的准确和完整性
-
内部审批流程:在公司内部,部门之间需要进行文件审批和签署,如合同、报价单等。通过CRM系统和一定签服务集成,可以实现内部审批流程的数字化,加快审批速度,减少纸质文档流转
-
合作伙伴协议签署:公司与合作伙伴之间的合作协议、合作协议等文件可以通过CRM系统管理,并使用E签宝服务让双方快速签署文件。这有助于加强合作伙伴关系,提高合作效率,并降低合作风险
案例教学:当CRM系统中发起合同后,通过一定签获取合同模板,上传合同并发起签署
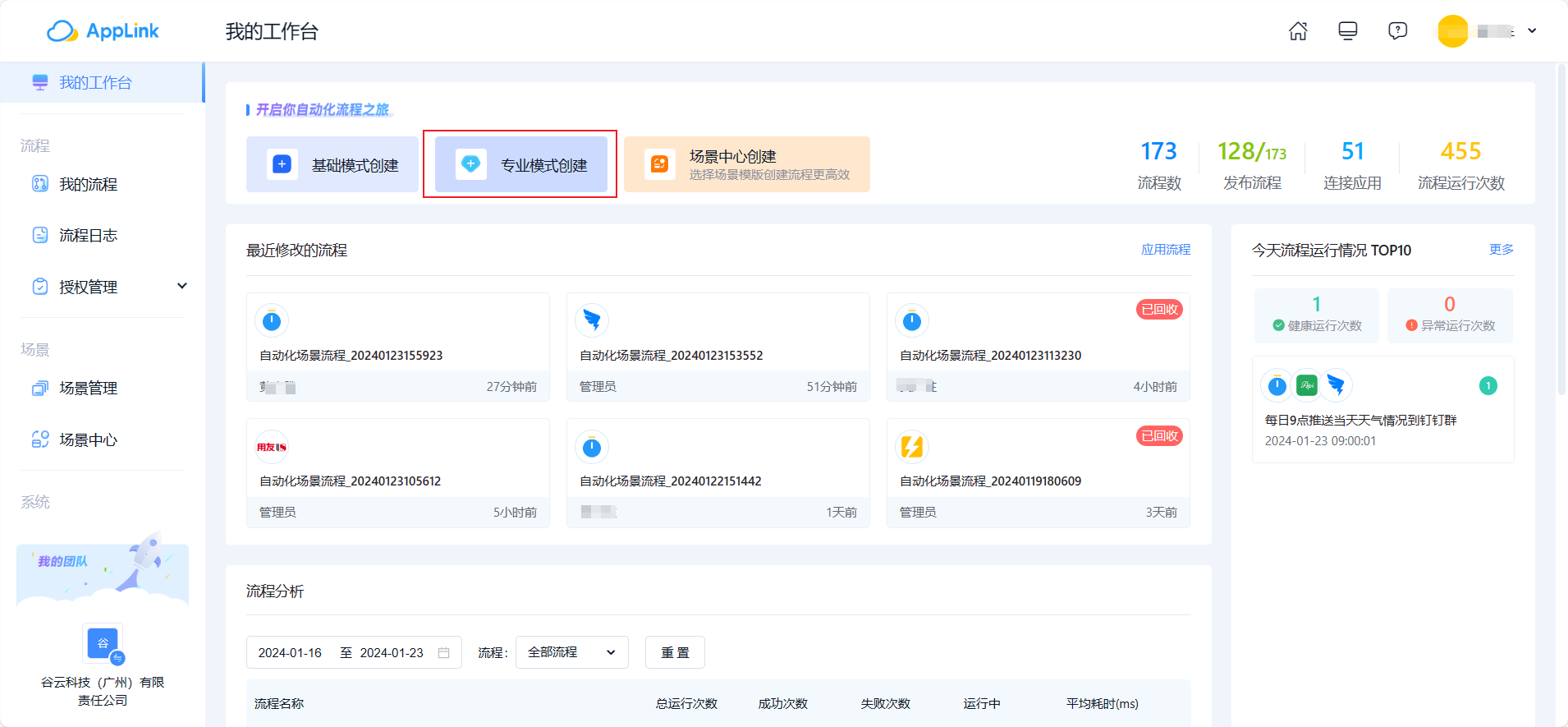
1.点击AppLink自动化集成平台 ,注册登录AppLink集成平台后进入我的工作台

2.进入工作台后点击专业模式创建进入画布设计
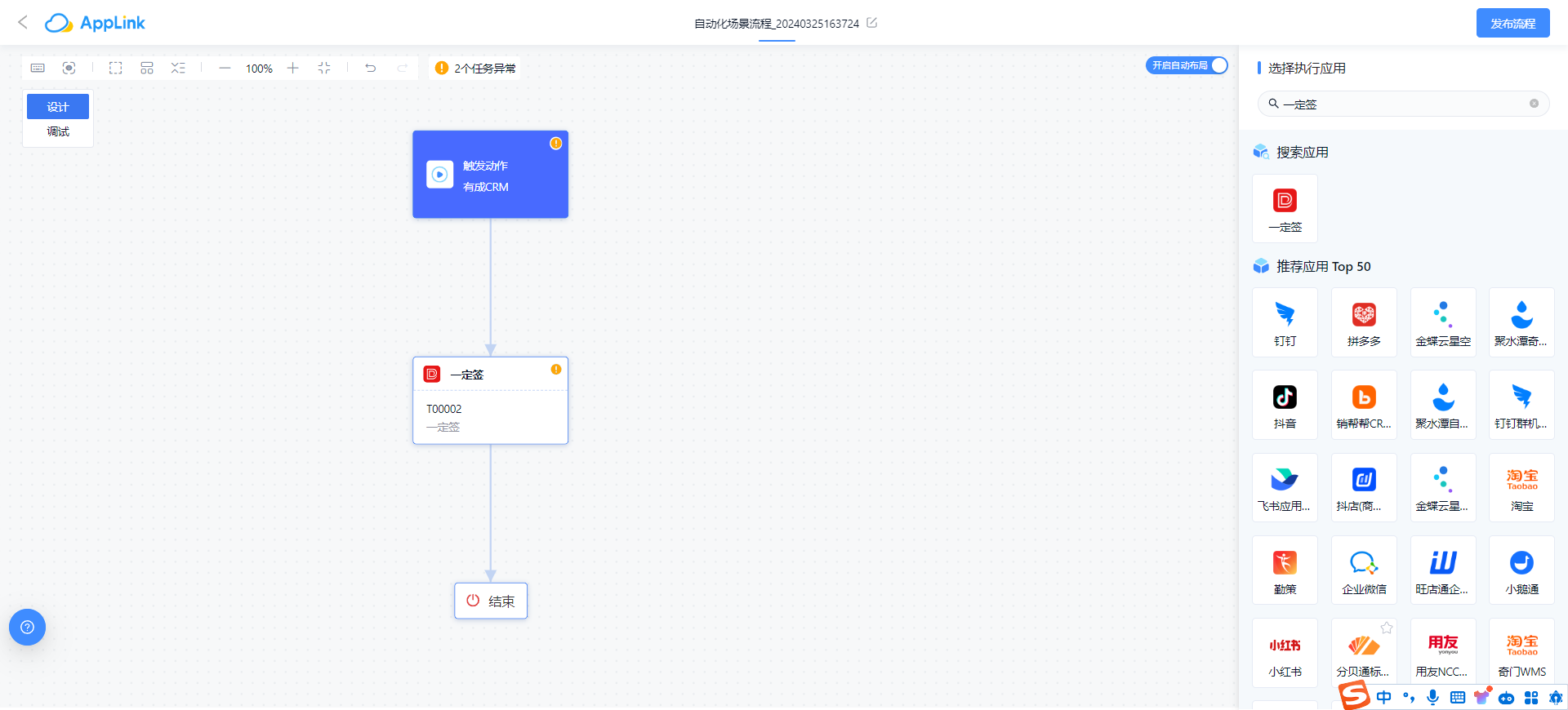
3.进入流程后,依次将相关对应的动作找出后拖入画布中,打开节点配置选择对应的选项以及填写对应的信息内容,具体动作顺序如下:触发动作【所需的CRM系统】--执行动作【一定签-上传合同并发起签署】
整合CRM系统与一定签服务能够有力地优化合同签署及文档管理的效能与便捷程度,实现事务流程的深度数字化转型。此举不仅能够以电子化签署路径替代传统的纸质文档流转,从而显著提升签署效率,更能在确保严谨合规的基础上,构筑坚实的数据安全屏障。这一系列的应用实践,极大地丰富并提升了客户的交互体验与满意度,为其带来更为高端、智能且安心的服务享受。

















 1262
1262

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









