




 本文详细解析了LeetCode上的一道题目——行走机器人模拟。通过使用C++实现,文章介绍了如何设计一个算法来模拟机器人在二维平面上的行走,同时避免碰撞到障碍物。算法考虑了方向变化和最大距离计算,利用集合存储障碍物位置,确保机器人不会进入障碍区域。通过遍历指令集,机器人可以改变方向或向前移动,同时更新最大距离。
本文详细解析了LeetCode上的一道题目——行走机器人模拟。通过使用C++实现,文章介绍了如何设计一个算法来模拟机器人在二维平面上的行走,同时避免碰撞到障碍物。算法考虑了方向变化和最大距离计算,利用集合存储障碍物位置,确保机器人不会进入障碍区域。通过遍历指令集,机器人可以改变方向或向前移动,同时更新最大距离。
文章作者:Tyan
博客:noahsnail.com | 优快云 | 简书
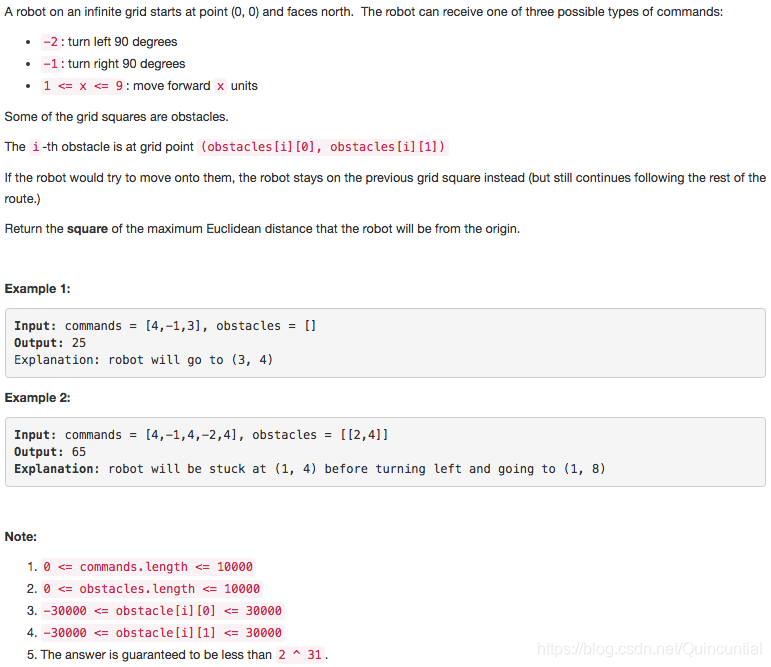
1. Description
2. Solution
class Solution {
public:
int robotSim(vector<int>& commands, vector<vector<int>>& obstacles) {
int x = 0;
int y = 0;
int maximum = 0;
char directions[] = {'N', 'E', 'S', 'W'};
int index = 0;
set<pair<int, int>> obstacleSet;
for (vector<int> obstacle: obstacles) {
obstacleSet.insert(make_pair(obstacle[0], obstacle[1]));
}
for(int i = 0; i < commands.size(); i++) {
if(commands[i] == -1) {
index = (index + 1) % 4;
}
else if(commands[i] == -2) {
index = (index - 1 + 4) % 4;
}
else {
for(int j = 0; j < commands[i]; j++) {
moveForward(obstacleSet, x, y, directions[index]);
maximum = max(maximum, x*x + y*y);
}
}
}
return maximum;
}
private:
void moveForward(set<pair<int, int>>& obstacleSet, int& x, int& y, char direction) {
switch(direction) {
case 'N':
if (obstacleSet.find(make_pair(x, y + 1)) == obstacleSet.end()) {
y += 1;
}
break;
case 'E':
if (obstacleSet.find(make_pair(x + 1, y)) == obstacleSet.end()) {
x += 1;
}
break;
case 'S':
if (obstacleSet.find(make_pair(x, y - 1)) == obstacleSet.end()) {
y -= 1;
}
break;
case 'W':
if (obstacleSet.find(make_pair(x - 1, y)) == obstacleSet.end()) {
x -= 1;
}
break;
}
}
};


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









