



一凡 发自 凹非寺
量子位 | 公众号 QbitAI
2025年最受资本热捧的具身智能初创公司,在2025年年终完成了“首秀”。
它石智航,成立不到1年拿了17亿元融资后,刚刚交卷,举行了首次技术发布会。
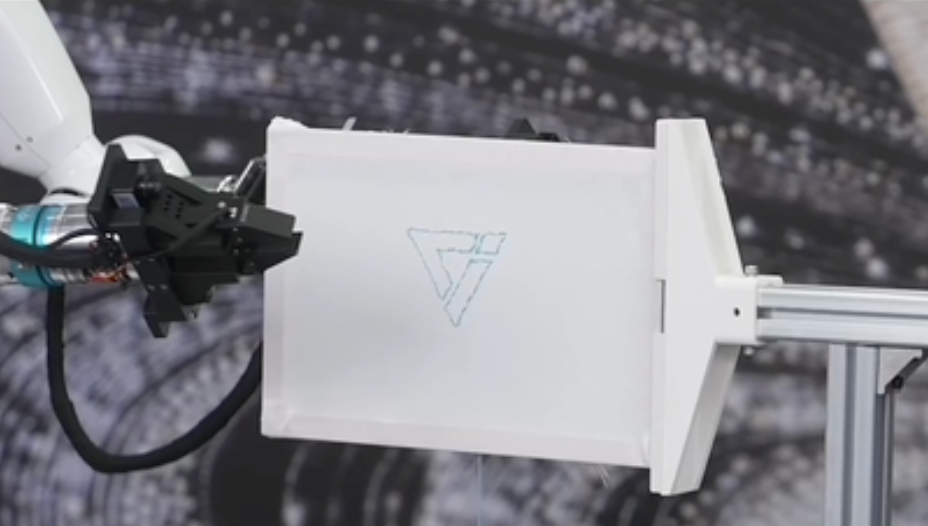
而它石的首秀,也是通过“绣”展现的——
首秀绣的是正是它石智航的LOGO,它石介绍说这是世界首台会刺绣的机器人。
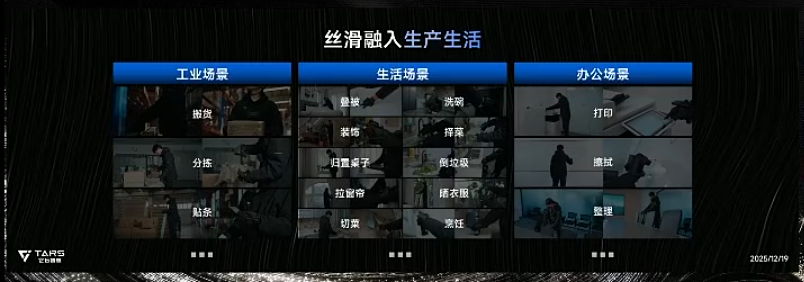
不只会干针线活,也能下车间:

以及今年各路机器人的基操——跳舞:

这背后的丝滑动作,都是由基于真实数据训练的世界模型输出。在不同场景下执行不同任务,覆盖家庭和车间也意味着,这不仅仅是一场技术发布会,也是商业化潜力的展现。
而背后支撑这一切的,是它石智航对下一代具身智能Scaling Law的理解。
它石智航“首绣”
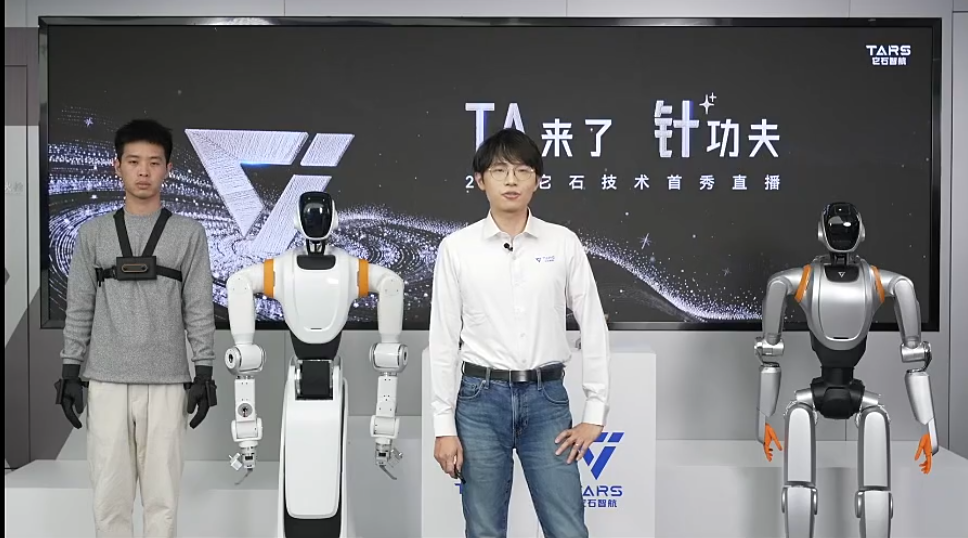
它石智航刚刚展示了两款产品:
工业机器人A系列(下图左二)和通用机器人T系列(下图右一),从下肢就能看出他们的差别。
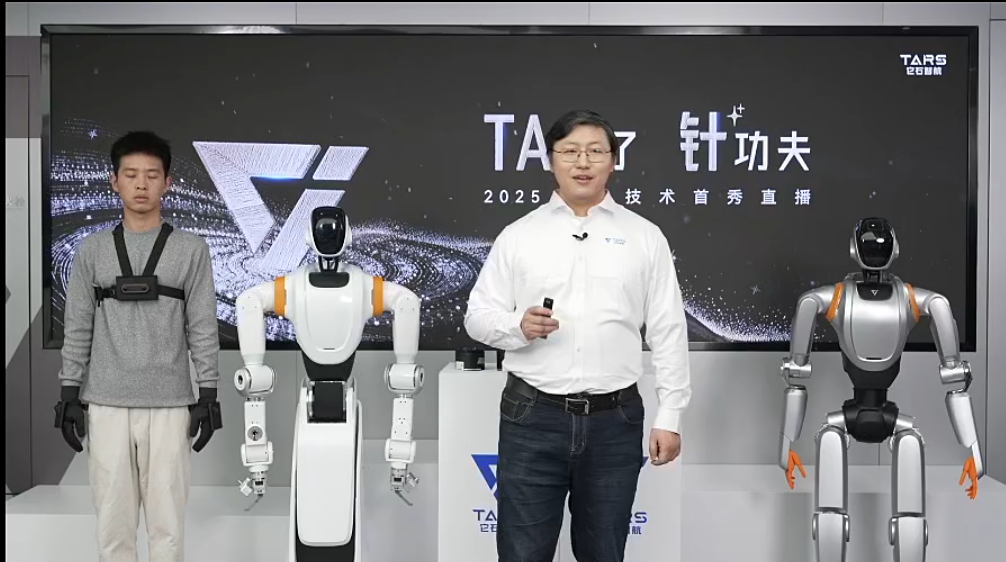
△A系列和T系列中间的是它石智航创始人、CEO陈亦伦
它石认为这体现了复杂操作任务的多种能力,亚毫米级精度、双手协同、连续触觉和力觉反馈调节和长时序任务的执行等。
所以为什么展示机器人的刺绣能力?这背后有两个原因:
秀技术和救手艺。
首先,是秀技术实力。
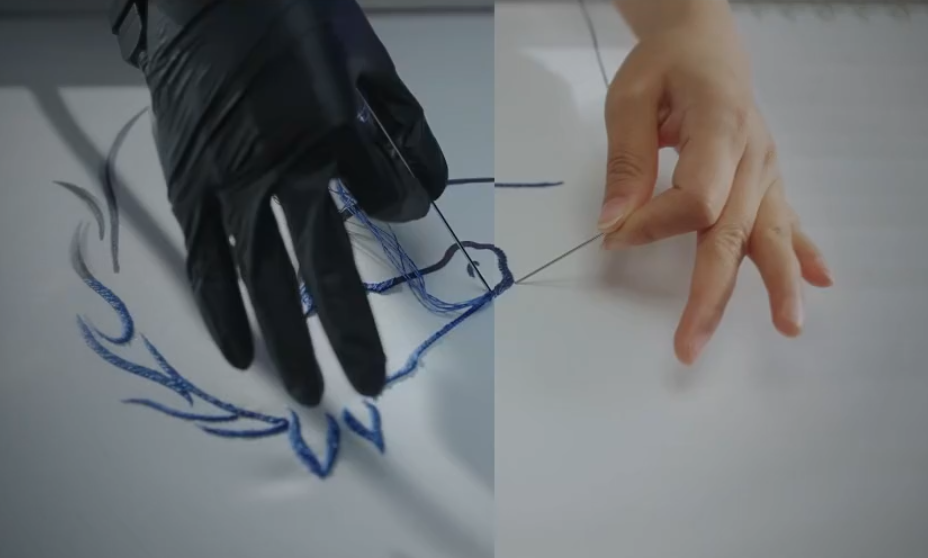
它石介绍称,刺绣工作其实体现了机器人在复杂空间下的精细操作能力,相关能力有望迁移到线束装配和精密制造等高精技术领域。
毕竟刺绣是一个比较极限的场景,对咱们人类来说,做针线活是靠感觉判断,对机器人则需要靠量化判断。
机器人需要实时感知针、线、布的变化。毕竟布料是一个轻薄的柔性物体,用力气大了,布会起皱,小了也不行,所以很考验对力觉的控制。同时针和线都是极其细小的物体,比较考验机器人对精度的控制。
其次,是救传统手艺。
据它石智航介绍,目前有部分针绣技法接近失传,机器人学会刺绣技法,实际上也是让非遗文化能够以数字形态延续。
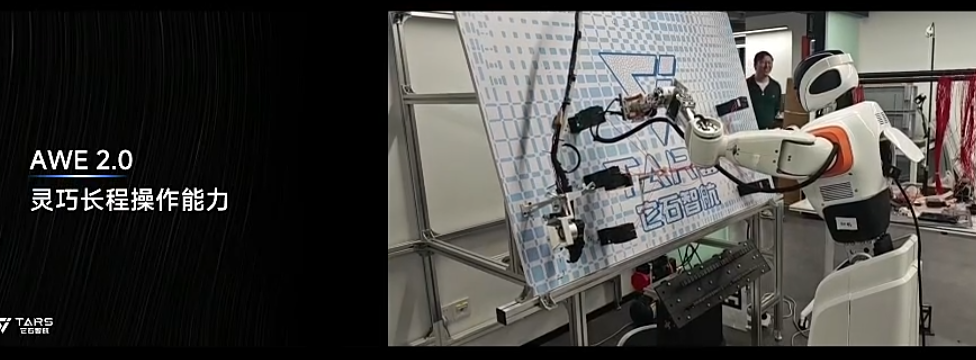
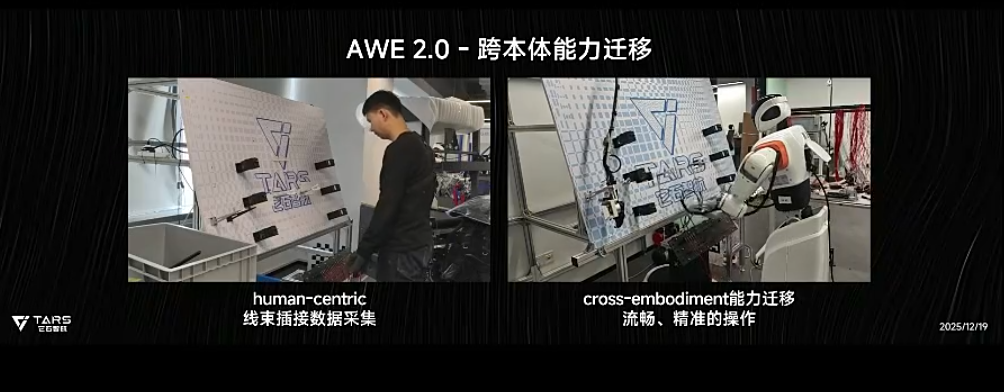
刺绣之外,它石还展示了复杂线束操作能力,在它石看来这是「机器人学的哥德巴赫猜想」。
因为机器人需要操作柔性物体,识别高密度线缆接口等,不能卡顿,顺滑执行,同时考验了效率、精度和成功率。

这是上一代机器人难以解决的痛点问题,也是这一代机器人技术的试金石。
它石给出了自己的解决方案,在真实世界中采集人类真实动作,反哺世界模型,软硬一体探索下一代具身智能的Scaling Law。
探索下一代具身智能的Scaling Law
它石在技术发布会上,展示了软硬全栈技术。
软件方面,它石首先介绍了数据采集套件SenseHub,据它石智航首席科学家丁文超(下图右二)介绍, 数据决定了具身智能的上限。
过去通过遥操,即人类佩戴设备,远程遥控,让机器人和自己同步做出动作,这种采集方式,采集到的不是人类的真实能力,而是为了机器人做出妥协。
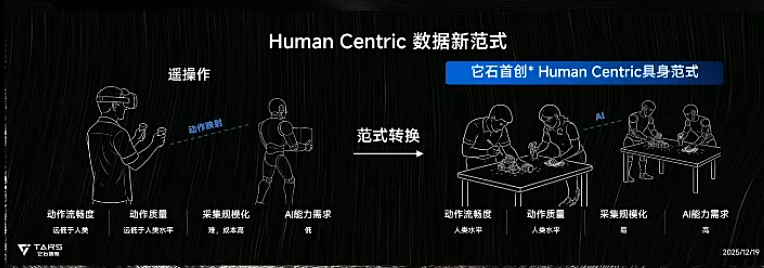
那么如何把人的动作,跨本体迁移到机器人?

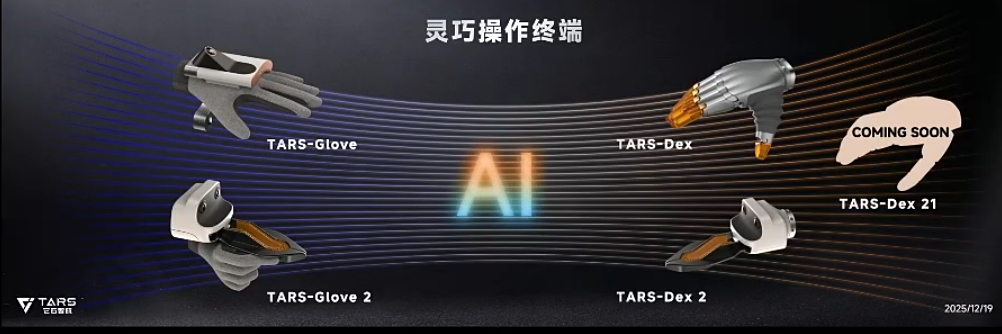
它石智航通过复现人类真实视角的TARS-Vision,以及灵巧手TARS Glove(通用五指)和Glove2(夹爪),“以人类为中心”采集数据,建立起环境和动作之间的因果关系,让真实的物理世界就是数据来源,各行各业的从业者,穿上设备,就能自然采集数据。
据了解,基于SenseHub采集到的数据,目前已沉淀为具身智能真实世界多模态数据集WIYH,包含视觉、动作、语言和触觉等类型。

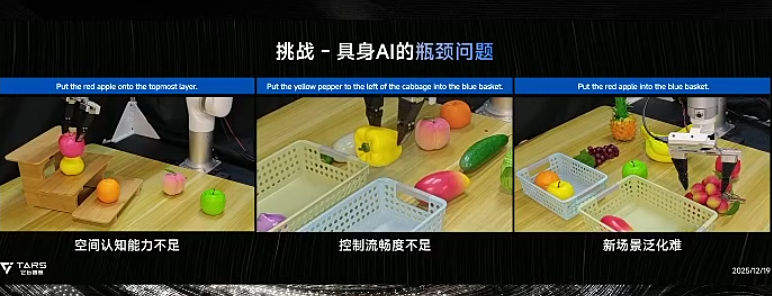
解决数据的问题后,具身智能还面临着模型能力的挑战。它石在实测目前SOTA(State Of The Art最先进的)开源成果后,发现具身智能模型面临着三大瓶颈:
空间认知瓶颈,表现是经常认错物体
流畅度不好,精准度也不够
泛化瓶颈,一套系统难以适应不同环境、不同任务、不同动作。
解决这三个难题,就需要具身智能的下一代Scaling Law,它石打造了AWE2.0。
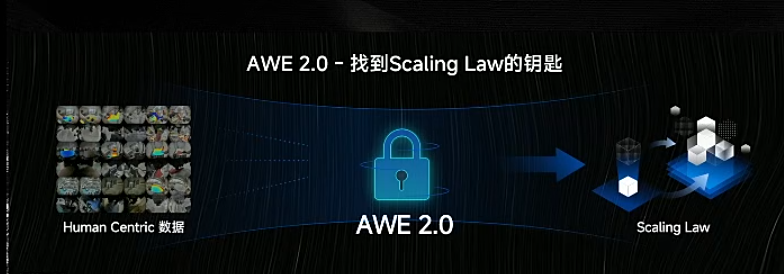
AWE 2.0把现实采集到的海量数据,用一段式全身端到端学习,迁移到机器人本体。
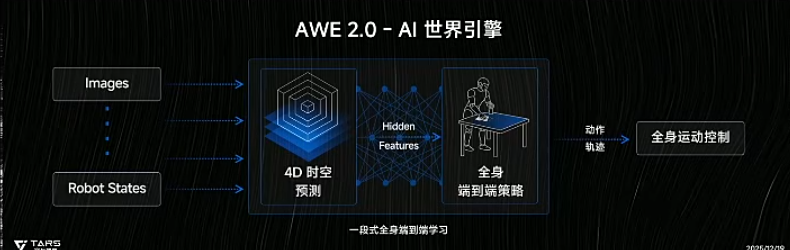
具体而言就是让机器人学会动作和空间的关联,用流式长期记忆关联其中的特征,不是这个动作怎么做,而是为什么要这么做,理解背后的关系,
在探索Scaling Law的道路上,再聪明的大脑,也需要灵活的本体来支撑。
它石智航CEO陈亦伦认为,在AI时代,算法才是机器人系统能力的天花板,因此它石的硬件本体都是围绕AI设计。这句话听上去,很像今年行业经常说的「AI定义汽车」。

它石瞄向本体全身自由度尽可能逼近人类,这将从第一性原理上降低了跨本体迁移的难度。具体拆分为零部件来看,目前核心传感器、计算单元、模型算法和整机系统,实现全栈自研。它石团队过去十年在自动驾驶积累的车规级工程经验,沉淀到具身智能领域。
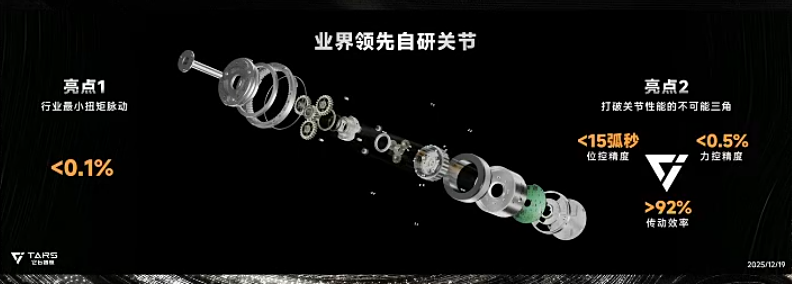
比如自研关节,实现行业最小扭矩脉动,平衡位控、力控和传动的“不可能三角”。
传感器组合方面,聚焦到眼睛和双手这两个核心部件,核心理念是人类和机器人共享同一套感知体系,让机器人通过一套设备,看人所看,感人所感。

灵巧手终端,除了前面提到负责采集的Glove系列,还有干活的Dex系列,也是分为五指和夹爪,视需求选择。
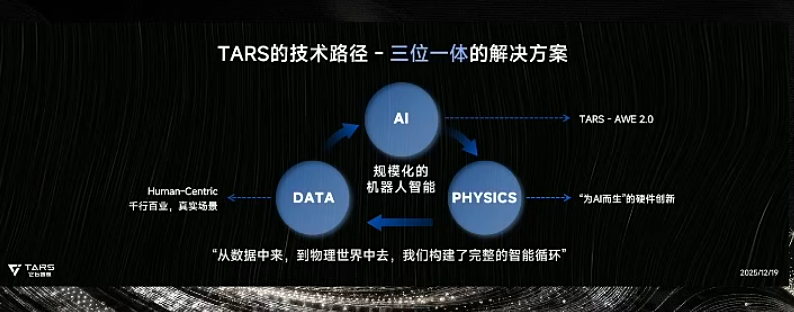
最后简单总结一下,它石智航的技术路径就是数据、模型和本体三位一体。数据采集是这一切的基础,模型是具身智能实现Scaling Law的路径,本体围绕模型而设计。
它石智航表示,这次发布会不是为了展现某个点的突破,而是展示一种确定性。刺绣是一个起点,机器人将融入我们的生产与生活,它不是被控制的机器,而是能够长期稳定工作的可靠智能体。
谁在背后推动着这种“确定性”?
它石智航是谁
它石智航,2025年2月正式成立,1个月后即官宣完成天使轮1.2亿美元,刷新中国具身智能行业最大天使轮纪录,这一轮由蓝驰创投和启明创投共同领投,线性资本、恒旭资本、洪泰基金、联想创投、襄禾资本、高瓴创投跟投。
据说这还是VC抢着投的结果,动作不快的投资机构,排到了下一轮。7月初它石智航又对外官宣了天使+轮1.22亿美元,领投方为美团,线性资本、襄禾资本,钧山投资、碧鸿投资、国汽投资、临港科创投、赛富投资基金、建发新兴投资共同跟投。
两轮融资额折合人民币约为17亿元,此后它石很少对外发声,赶在岁末年终,首次发布技术,而发布会上走到台前的有两位核心人物。
首先是负责介绍总体情况和硬件本体的陈亦伦,他是它石智航的创始人兼CEO。
创业前历任大疆机器视觉总工程师、华为自动驾驶系统CTO、清华大学AIR研究院智能机器人方向首席科学家。华为L2如今的“遥遥领先”,正是发端于他。

介绍模型算法的是它石智航的联合创始人、首席科学家丁文超,是一位90后,生于1993年,是华为“天才少年”计划的首批入选者,并且被派往了挑战最大的自动驾驶军团,从0到1主导了华为ADS智驾端到端决策网络。
它石智航还有一位很少走到台前的创始人:董事长李震宇。他早年在华为从事网络技术研发,2007年加盟百度,一路升任百度集团资深副总裁,一手组建并长期领导自动驾驶事业部,为萝卜快跑打下雄厚基础。

它石的首次技术首秀,不仅展现了技术的全面,也初步透露了商业化构想:
不只ToB也不只ToC,依靠具身智能的Scaling Law,它石全都要。
一键三连「点赞」「转发」「小心心」
欢迎在评论区留下你的想法!
— 完 —
专属AI产品从业者的实名社群,只聊AI产品最落地的真问题  扫码添加小助手,发送「姓名+公司+职位」申请入群~
扫码添加小助手,发送「姓名+公司+职位」申请入群~

进群后,你将直接获得:
👉 最新最专业的AI产品信息及分析 🔍
👉 不定期发放的热门产品内测码 🔥
👉 内部专属内容与专业讨论 👂
🌟 点亮星标 🌟
科技前沿进展每日见


















 8
8

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









